Learning Discrete Structures for GNNs (2019, 145)
Contents
- Abstract
- Introduction
- Background
- Graph Theory Basics
- GNNs
- Bilevel Programming in ML
- Learning Discrete Graph Structures
- Jointly Learning the Structure & Parameters
- Structure Learning via Hypergradient Descent
0. Abstract
GNN
- incorporate a spare & discrete dependency structure between data
- but can be used with “GRAPH-structure” data
- however, most of them are noisy & incomplete
propose to “jointly” learn the
- 1) graph structure
- 2) parameters of GCNs
by approximately solving a “bilevel program”, that learns a discrete probability distribution on the edges of the graph
1. Introduction
while graph structure is available in some domains,
if not…has to be ‘inferred or constructed’!
Possible approach
- 1) create kNN graph ( based on some similarity measure )
- shortcomings :
- 1) choice of \(k\)?
- 2) choice of ‘similarity measure’?
- shortcomings :
- 2) kernel matrix to model similarity
- at the cost of dense dependency structure
- 3) this paper…
Proposal
- Goal
- 1) learning “discrete” & “sparse” dependencies between data,
- 2) while simultaneously training the “parameters of GCN”
- Model
- generative probabilistic model for graphs
- edges : random variables
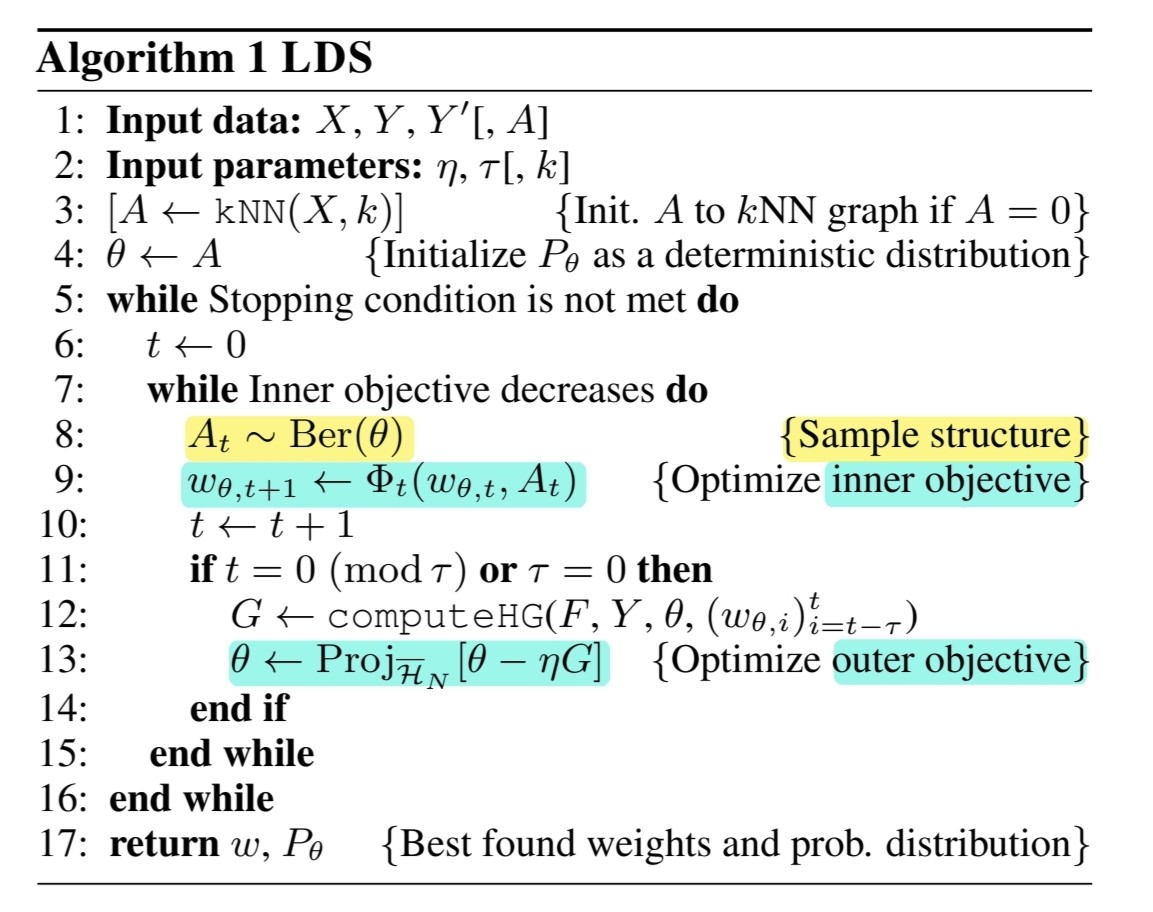
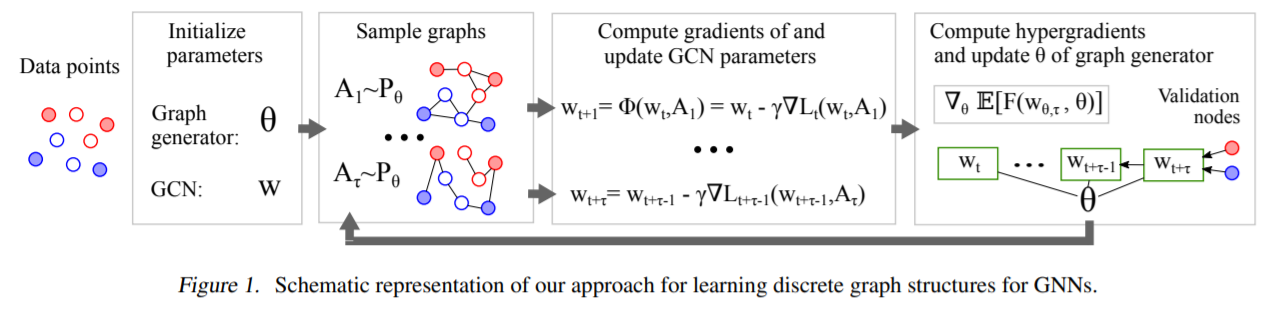
- Procedure
- **(step 1) sample the structure **
- ( by minimizing inner objective )
- training error
- (step 2) optimize the edge distn parameters
- ( by minimizing outerobjective )
- validation error
- **(step 1) sample the structure **
2. Background
(1) Graph Theory Basics
Notation
- graph \(G\) : pair \((V, E)\)
- nodes : \(V=\left\{v_{1}, \ldots, v_{N}\right\}\)
- edges : \(E \subseteq V \times V\)
- \(N\) : # of nodes
- \(M\) : # of edges
- graph Laplacian : \(L=D-A\)
- \(D_{i, i}=\sum_{j} A_{i, j}\),
- \(D_{i, j}=0\) if \(i \neq j\)
(2) GNNs
will focus especially on GCNs
GNN’s 2 inputs
- 1) feature matrix \(X \in \mathcal{X}_{N} \subset \mathbb{R}^{N \times n}\)
- \(n\) : # of different node features
- 2) graph \(G=(V, E)\)
- with adjacency matrix \(A \in \mathcal{H}_{N}\)
Notation
-
class labels : \(\mathcal{Y}\)
-
labeling function : \(y: V \rightarrow \mathcal{Y}\)
Objective :
- given a set of training nodes \(V_{\text {Train }}\) ….
- learn a function \(f_{w}: \mathcal{X}_{N} \times \mathcal{H}_{N} \rightarrow \mathcal{Y}^{N}\)
- \[L(w, A)=\sum_{v \in V_{\text {Train }}} \ell\left(f_{w}(X, A)_{v}, y_{v}\right)+\Omega(w),\]
\(\rightarrow\) “INNER optimization” / “GCN parameters”
Example of \(f_w\) : “2 hidden layer GCN”
-
compute class probabilities as…
\(f_{w}(X, A)=\operatorname{Softmax}\left(\hat{A} \operatorname{ReLu}\left(\hat{A} X W_{1}\right) W_{2}\right)\).
-
\(w=\left(W_{1}, W_{2}\right)\) : parameters of GCN
-
\(\hat{A}\) : normalized adjacency matrix
( = \(\tilde{D}^{-1 / 2}(A+I) \tilde{D}^{-1 / 2}\) , where \(\tilde{D}_{i i}=1+\sum_{j} A_{i j} .\) )
-
(3) Bilevel Programming in ML
Optimization problems, constrained with another optimization problem
\(\min _{\theta, w_{\theta}} F\left(w_{\theta}, \theta\right)\) such that \(w_{\theta} \in \arg \min _{w} L(w, \theta)\).
2 objective functions
- \(F\) : outer objective
- \(L\) : inner objective
3. Learning Discrete Graph Structures
setting : challenging scenarios…where
- graph structures is “missing” / “incomplete” / “noisy”
- variables
- inner variables = parameters of GCN
- outer variables = parameters of generative probabilistic model for graphs
(1) Jointly Learning the Structure & Parameters
assume a known target \(V_{val}\) ( validation dataset )
\(\rightarrow\) can estimate “generalization error”
[ OUTER = parameter of graph structure ]
Find \(A \in \mathcal{H}_{N}\), which minimizes the function
- \(F\left(w_{A}, A\right)=\sum_{v \in V_{\mathrm{val}}} \ell\left(f_{w_{A}}(X, A)_{v}, y_{v}\right)\).
- since discrete….
- propose to model each edge with “Bernoulli r.v”
[ INNER = parameters of GCN ]
- \(L(w, A)=\sum_{v \in V_{\text {Train }}} \ell\left(f_{w}(X, A)_{v}, y_{v}\right)+\Omega(w)\).
Reformulation
\[\begin{gathered} \min _{\theta \in \overline{\mathcal{H}}_{N}} \mathbb{E}_{A \sim \operatorname{Ber}(\theta)}\left[F\left(w_{\theta}, A\right)\right] \\ \text { such that } w_{\theta}=\arg \min _{w} \mathbb{E}_{A \sim \operatorname{Ber}(\theta)}[L(w, A)] \end{gathered}\]Expected output of GCN
-
(original)
\(f_{w}^{\exp }(X)=\mathbb{E}_{A}\left[f_{w}(X, A)\right]=\sum_{A \in \mathcal{H}_{N}} P_{\theta}(A) f_{w}(X, A)\).
-
(empirical estimate)
\(\hat{f}_{w}(X)=\frac{1}{S} \sum_{i=1}^{S} f_{w}\left(X, A_{i}\right),\).
- \(S\) : # of samples to draw
- sample \(S\) graphs from distn \(P_{\theta}\)
(2) Structure Learning via Hypergradient Descent
Variables
- Outer : \(\theta\)
- Inner : \(w\)
[ INNER ]
\(\mathbb{E}_{A \sim \operatorname{Ber}(\theta)}[L(w, A)]=\sum_{A \in \mathcal{H}_{N}} P_{\theta}(A) L(w, A)\).
- composed of sum of \(2^{N^2}\) terms
- intractable! use SGD
- \(w_{\theta, t+1}=\Phi\left(w_{\theta, t}, A_{t}\right)=w_{\theta, t}-\gamma_{t} \nabla L\left(w_{\theta, t}, A_{t}\right)\).
- where \(A_t \sim \text{Ber}(\theta)\)
[ OUTER ]
- \(w_{\theta, T}\) : approximate minimizer of \(\mathbb{E}[L]\)
- need an estimator for hypergradient, \(\nabla_{\theta} \mathbb{E}_{A \sim \operatorname{Ber}(\theta)}\left[F\left(w_{\theta, T}, A\right)\right] .\)
- Trick
- smooth reparameterization for \(P_{\theta}\)
- (before) \(z \sim P_{\theta}\)
- (after) \(z=\operatorname{sp}(\theta, \varepsilon)\) for \(\varepsilon \sim P_{\varepsilon}\)
- \(\nabla_{\theta} \mathbb{E}_{z \sim P_{\theta}}[h(z)]=\mathbb{E}_{\varepsilon \sim P_{\varepsilon}}\left[\nabla_{\theta} h(\operatorname{sp}(\theta, \varepsilon))\right]= \mathbb{E}_{z \sim P_{\theta}}\left[\nabla_{z} h(z) \nabla_{\theta} z\right]\).
- use Identity Mapping \(A = \operatorname{sp}(\theta, \varepsilon) = \theta\)
- \(\nabla_{\theta} \mathbb{E}_{A \sim \operatorname{Ber}(\theta)}\left[F\left(w_{\theta, T}, A\right)\right] \approx \mathbb{E}_{A \sim \operatorname{Ber}(\theta)}\left[\nabla_{A} F\left(w_{\theta, T}, A\right)\right]\).
(3) Summary