
Graph Augmented Normalizing Flows for AD of MTS (2022)
Contents
- Abstract
- Introduction
- Preliminaries
- Normalizing Flows
- Bayesian Networks
- Problem Statement
- Method
- Factorization
- NN Parameterization
- Joint Training
0. Abstract
Anomaly Detection
-
detecting anomalies for MTS is challenging… due to intricate interdependencies
-
Hypothesize that “anomalies occur in LOW density regions of distn”
\(\rightarrow\) use of NFs for unsupervised AD
GANF ( Graph Augmented NF )
propose a novel flow model, by imposing a Bayesian Network (BN)
-
BN : DAG (Directed Acyclic Graph) that models causal relationships
( factorizes joint probability into product of easy-to-evaluate conditional probabilities )
1. Introduction
explore the use of NF for AD
- NF = DGM for learning underlying distn of data samples
- NF = unsupervised
Issue = “High dimensionality” & “Interdependency challenges”
\(\rightarrow\) solve by learning the relational structure among constituent series
Bayesian networks
- models “causal relationships”
- DAG, where node is “conditionally independent” of its non-descendents, given its parents
- allows factorizing the intractable joint density
GANF
- agument NF with “graph structure learning”
- apply to solve AD
2. Preliminaries
(1) Normalizing Flows
Notation
- MTS : \(\mathbf{x} \in \mathbb{R}^{D}\)
- NF : \(\mathbf{f}(\mathbf{x}): \mathbb{R}^{D} \rightarrow \mathbb{R}^{D}\)
- normalizes the distribution of \(\mathbf{x}\) to a “standard” distribution ( base distribution )
- output of NF : \(\mathbf{z}=\mathbf{f}(\mathbf{x})\)
- with pdf \(q(\mathbf{z})\)
Change of Variable :
density of the \(\mathbf{x}\), \(p(\mathbf{x})\) =
- \(\log p(\mathbf{x})=\log q(\mathbf{f}(\mathbf{x}))+\log \mid \operatorname{det} \nabla_{\mathbf{x}} \mathbf{f}(\mathbf{x}) \mid\).
Computaitonal Issues
- (1) Jacobian determinant needs to be easy to compute
- (2) \(f\) need to be invertible
- \(\mathbf{x}=\mathbf{f}^{-1}(\mathbf{z})\).
ex) MAF (Masked Autoregressive Flow)
- output : \(\mathbf{z}=\left[z_{1}, \ldots, z_{D}\right]\).
- input : \(\mathbf{x}=\left[x_{1}, \ldots, x_{D}\right]\)
- mapping : \(z_{i}=\left(x_{i}-\mu_{i}\left(\mathbf{x}_{1: i-1}\right)\right) \exp \left(\alpha_{i}\left(\mathbf{x}_{1: i-1}\right)\right)\)
- \(\mu_i\) & \(\alpha_i\) : NN
Conditional flow
-
\(\mathbf{f}: \mathbb{R}^{D} \times \mathbb{R}^{d} \rightarrow \mathbb{R}^{D}\).
-
Additional Info = flow may be augmented with conditional information \(\mathbf{h} \in \mathbb{R}^{d}\)
( may have different dimension )
-
\(\log p(\mathbf{x} \mid \mathbf{h})=\log q(\mathbf{f}(\mathbf{x} ; \mathbf{h}))+\log \mid \operatorname{det} \nabla_{\mathbf{x}} \mathbf{f}(\mathbf{x} ; \mathbf{h}) \mid\).
NF for time series
-
\(\mathbf{X}=\left[\mathbf{x}_{1}, \mathbf{x}_{2}, \ldots, \mathbf{x}_{T}\right]\), where \(\mathbf{x}_{t} \in \mathbb{R}^{D}\)
-
via successive conditioning…
-
\(p(\mathbf{X})=p\left(\mathbf{x}_{1}\right) p\left(\mathbf{x}_{2} \mid \mathbf{x}_{<2}\right) \cdots p\left(\mathbf{x}_{T} \mid \mathbf{x}_{<T}\right)\).
-
Rasul et al. (2021) propose to model each \(p\left(\mathbf{x}_{t} \mid \mathbf{x}_{<t}\right)\) as \(p\left(\mathbf{x}_{t} \mid \mathbf{h}_{t-1}\right)\), where \(\mathbf{h}_{t-1}\) summarizes the \(\mathbf{x}_{<t}\)
-
(2) Bayesian Networks
Bayesian Network
= describes the conditional independence among variables
Notation
- \(X^{i}\) : general random variable
- \(n\) variables \(\left(X^{1}, \ldots, X^{n}\right)\) = nodes of DAG
- \(\mathbf{A}\) : weighted adjacency matrix
- where \(\mathbf{A}_{i j} \neq 0\) if \(X^{j}\) is the parent of \(X^{i}\)
Density of the joint distribution of \(\left(X^{1}, \ldots, X^{n}\right)\) is
-
\(p\left(X^{1}, \ldots, X^{n}\right)=\prod_{i=1}^{n} p\left(X^{i} \mid \operatorname{pa}\left(X^{i}\right)\right)\).
where \(\operatorname{pa}\left(X^{i}\right)=\left\{X^{j}: \mathbf{A}_{i j} \neq 0\right\}\).
3. Problem Statement
Unsupervised Anomaly Detection with MTS
- training set \(\mathcal{D}\) : only UNlabeled data ( assume most of them are NOT anomalies )
- \(\mathcal{X} \in \mathcal{D}\) contains \(n\) constituent series with \(D\) attributes and of length \(T\)
- \(\left(\mathbf{X}^{1}, \mathbf{X}^{2}, \ldots, \mathbf{X}^{n}\right)\), where \(\mathbf{X}^{i} \in \mathbb{R}^{T \times D}\).
- use a Bayesian network (DAG) to model the relational structure of the constituent series \(\mathbf{X}^{i}\)
- augment NF to compute density of \(\mathcal{X}\)
- \(\mathbf{A} \in \mathbb{R}^{n \times n}\) : adjacency matrix of DAG
Augmented Flow : \(\mathcal{F}:(\mathcal{X}, \mathbf{A}) \rightarrow \mathcal{Z}\)
- anomaly points : LOW densities
- conduct UNsupervised AD, by evaluating the density of a MTS computed through the augmented flow
4. Method
Graph Augmented NF : \(\mathcal{F}:(\mathcal{X}, \mathbf{A}) \rightarrow \mathcal{Z}\)
Central Idea : FACTORIZATION
- factorize \(p(\mathcal{X})\) along the…
- (1) series dimension ( using Bayesian Network )
- (2) temporal dimension ( using conditional NF )
(1) Factorization
Density of MTS \(\mathcal{X}=\left(\mathbf{X}^{1}, \mathbf{X}^{2}, \ldots, \mathbf{X}^{n}\right)\) :
- can be computed as the product of \(p\left(\mathbf{X}^{i} \mid \mathrm{pa}\left(\mathbf{X}^{i}\right)\right)\) for all nodes
- further factorize each conditional density along the temporal dimension
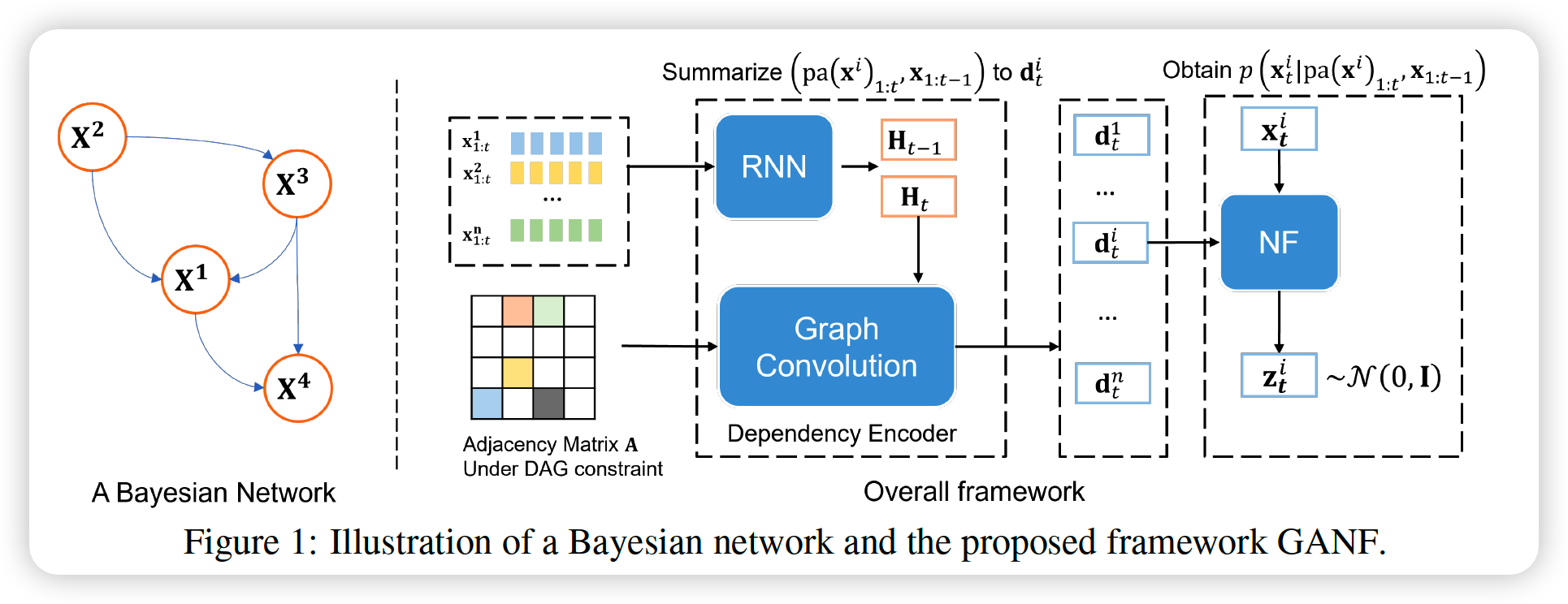
\(p(\mathcal{X})=\prod_{i=1}^{n} p\left(\mathbf{X}^{i} \mid \operatorname{pa}\left(\mathbf{X}^{i}\right)\right)=\prod_{i=1}^{n} \prod_{t=1}^{T} p\left(\mathbf{x}_{t}^{i} \mid \operatorname{pa}\left(\mathbf{x}^{i}\right)_{1: t}, \mathbf{x}_{1: t-1}^{i}\right)\).
- parameterize each conditional density \(p\left(\mathbf{x}_{t}^{i} \mid \operatorname{pa}\left(\mathbf{x}^{i}\right)_{1: t}, \mathbf{x}_{1: t-1}^{i}\right)\), by using a Graph-based dependency encoder
(2) NN Parameterization
conditional densities \(p\left(\mathbf{x}_{t}^{i} \mid \operatorname{pa}\left(\mathbf{x}^{i}\right)_{1: t}, \mathbf{x}_{1: t-1}^{i}\right)\)
-
can be learned by using conditional NF
-
Shape (Dimension Issue)
-
pa \(\left(\mathbf{x}^{i}\right)_{1: t}\) and \(\mathbf{x}_{1: t-1}^{i}\) cannot be directly used for parameterization!
-
thus, design a graph-based dependency encoder
\(\rightarrow\) make it into \(d\)-dim fixed length vector
-
Dependency Encoder
step 1) use RNN to map MTS to fixed length vector
- \(\mathbf{h}_{t}^{i}=\operatorname{RNN}\left(\mathbf{x}_{t}^{i}, \mathbf{h}_{t-1}^{i}\right)\).
- Share RNN parameters across all nodes in DAG
step 2) GCN
-
aggregate hidden states of the parents for dependency encoding
-
output : \(\mathbf{D}_{t}=\left(\mathbf{d}_{t}^{1}, \ldots, \mathbf{d}_{t}^{n}\right)\), for all \(t\)
-
\(\mathbf{D}_{t}=\operatorname{ReLU}\left(\mathbf{A H}_{t} \mathbf{W}_{1}+\mathbf{H}_{t-1} \mathbf{W}_{2}\right) \cdot \mathbf{W}_{3}\).
- \(\mathbf{W}_{1} \in \mathbb{R}^{d \times d}\).
- \(\mathbf{W}_{2} \in \mathbb{R}^{d \times d}\).
- \(\mathbf{W}_{3} \in \mathbb{R}^{d \times d}\) ( additional transformation to improve performance )
Density Estimation
- with dependency encoder, obtain \(\mathbf{d}_{t}^{i}\)
- apply NF on \(\mathbf{d}_{t}^{i}\), to model each \(p\left(\mathbf{x}_{t}^{i} \mid \mathrm{pa}\left(\mathbf{x}^{i}\right)_{1: t}, \mathbf{x}_{1: t-1}^{i}\right)\)
- NF : \(\mathbf{f}: \mathbb{R}^{D} \times \mathbb{R}^{d} \rightarrow \mathbb{R}^{D}\)
- parameters of NF are also shared!
- conditional density of \(x_t^{i}\) :
- \(\log p\left(\mathbf{x}_{t}^{i} \mid \operatorname{pa}\left(\mathbf{x}^{i}\right)_{1: t}, \mathbf{x}_{1: t-1}^{i}\right)=\log p\left(\mathbf{x}_{t}^{i} \mid \mathbf{d}_{t}^{i}\right)=\log q\left(\mathbf{f}\left(\mathbf{x}_{t}^{i} ; \mathbf{d}_{t}^{i}\right)\right)+\log \mid \operatorname{det} \nabla_{\mathbf{x}_{t}^{i}} \mathbf{f}\left(\mathbf{x}_{t}^{i} ; \mathbf{d}_{t}^{i}\right) \mid\).
- example of \(f\) : RealNVP, MAF …
Log Density of MTS
- \(\log p(\mathcal{X})=\sum_{i=1}^{n} \sum_{t=1}^{T}\left[\log q\left(\mathbf{f}\left(\mathbf{x}_{t}^{i} ; \mathbf{d}_{t}^{i}\right)\right)+\log \mid \operatorname{det} \nabla_{\mathbf{x}_{t}^{\mathbf{f}}} \mathbf{f}\left(\mathbf{x}_{t}^{i} ; \mathbf{d}_{t}^{i}\right) \mid \right]\).
Anomaly Measures
-
use the density computed by \(\log p(\mathcal{X})\)
- lower density = more likely anomaly
-
also produces conditional densities for each constituent series
- conditional densities : \(\log p\left(\mathbf{X}^{i} \mid \mathrm{pa}\left(\mathbf{X}^{i}\right)\right)=\) \(\sum_{t=1}^{T} \log p\left(\mathbf{x}_{t}^{i} \mid \mathbf{d}_{t}^{i}\right)\)
- use this as anomaly measure
( low density \(p(\mathcal{X})\) is caused by one or a few low conditional densities \(p\left(\mathbf{X}^{i} \mid \mathrm{pa}\left(\mathbf{X}^{i}\right)\right)\) )
(3) Joint Training
Training Objective
= joint density (likelihood) of the observed data
= KL-divergence between true distn & recovered distn
(with DAG constraint…)
\(\min _{\mathbf{A}, \boldsymbol{\theta}} \mathcal{L}(\mathbf{A}, \boldsymbol{\theta})=\frac{1}{ \mid \mathcal{D} \mid } \sum_{i=1}^{ \mid \mathcal{D} \mid }-\log p\left(\mathcal{X}_{i}\right)\).
s.t. \(h(\mathbf{A})=\operatorname{tr}\left(e^{\mathbf{A} \circ \mathbf{A}}\right)-n=0\)