
Modeling Long and Short Term Temporal Patterns with DNN (2017, 496)
Contents
- Abstract
- Introduction
- Related Background
- Framework
- Problem Formulation
- Convolutional Component
- Recurrent Component
- Recurrent Skip Component
- Dense Layer
- Temporal Attention Layer
- Autoregressive Component
- Loss Function
0. Abstract
-
goal : MTS forecasting
- Temporal data = mixture of long & short term patterns
- traditional models ( GP, AR ) fails..
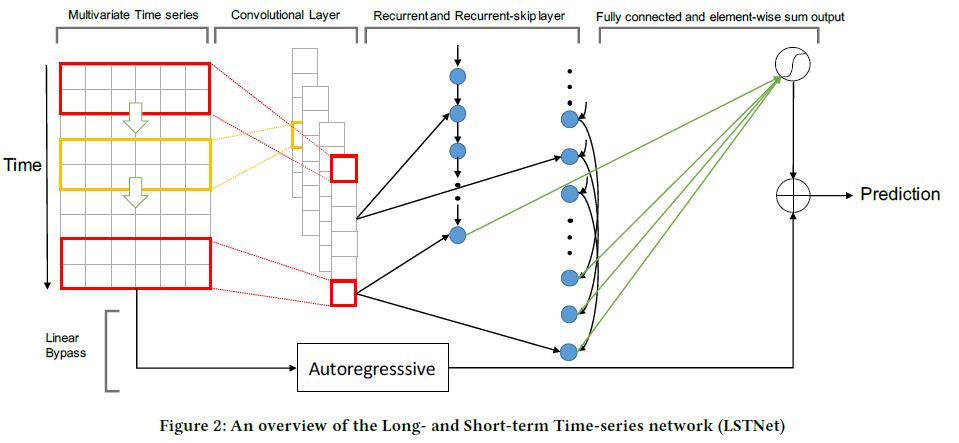
- propose LSTNet (Long and Short-term Time-series Network)
LSTNet
(1) use CNN & RNN to extract …
- 1) short term local dependency patterns ( among variables )
- 2) long term patterns for time series trends
(2) leverage traditional autoregressive model to tackle the scale insensitive problem
1. Introduction
MTS key point :
- how to capture & leverage “dynamics dependencies among multiple variables”
Real-world data :
- mixture of LONG & SHORT term repeating patterns
- how to capture both?
LSTNet ( Long and Short-term Time-series Network )
- 1) CNN
- to discover “LOCAL dependency patterns” among multi-dimensional input
- 2) RNN
- to capture “complex LONG term dependencies”
- 3) Recurrent-skip
- capture very long-term dependence patterns
- 4) incorporate a traditional autoregressive linear model in parallel
2. Related Background
Univariate TS
-
ARIMA ( Box-Jenkins methodology )
\(\rightarrow\) rarely used in high-dimensional MTS ( \(\because\) high computational cost )
-
VAR ( Vector Autoregression )
- VAR = AR + MTS
- widely used MTS for its simplicity
-
ignores the dependencies between output variables
-
model capacity of VAR grows ….
-
linearly over the temporal window size
-
quadratically over the number of variables
-
Others
-
SVR : non-linear
-
Ridge, LASSO …. : linear
\(\rightarrow\) practically more efficient for MTS, but fail to capture complex relationship
-
GP (Gaussian Process) : non-parametric
- can be applied to MTS
- can be used as a prior over the function space in Bayesian Inference
- high computation complexity
3. Framework
(1) Problem Formulation
interested in MTS
Notation :
- \(Y=\left\{\boldsymbol{y}_{1}, \boldsymbol{y}_{2}, \ldots, \boldsymbol{y}_{T}\right\}\) : fully observed TS
- \(\boldsymbol{y}_{t} \in \mathbb{R}^{n}\) ( \(n\) : # of variables )
- [INPUT] \(X_{T}=\left\{\boldsymbol{y}_{1}, \boldsymbol{y}_{2}, \ldots, \boldsymbol{y}_{T}\right\} \in \mathbb{R}^{n \times T}\).
- [OUTPUT] \(\hat{\boldsymbol{y}}_{T+h+1}\)
(2) Convolutional Component
[FIRST layer]
- CNN without pooling
- goal : extract SHORT term patterns & LOCAL dependencies between variables
(3) Recurrent Component
[SECOND layer]
- output of CNN is fed into “Recurrent component” & “Recurrent-skip component”
\(\begin{aligned} r_{t} &=\sigma\left(x_{t} W_{x r}+h_{t-1} W_{h r}+b_{r}\right) \\ u_{t} &=\sigma\left(x_{t} W_{x u}+h_{t-1} W_{h u}+b_{u}\right) \\ c_{t} &=R E L U\left(x_{t} W_{x c}+r_{t} \odot\left(h_{t-1} W_{h c}\right)+b_{c}\right) \\ h_{t} &=\left(1-u_{t}\right) \odot h_{t-1}+u_{t} \odot c_{t} \end{aligned}\).
(4) Recurrent-skip Component
- to solve gradient vanishing problem
\(\begin{aligned} &r_{t}=\sigma\left(x_{t} W_{x r}+h_{t-p} W_{h r}+b_{r}\right) \\ &u_{t}=\sigma\left(x_{t} W_{x u}+h_{t-p} W_{h u}+b_{u}\right) \\ &c_{t}=R E L U\left(x_{t} W_{x c}+r_{t} \odot\left(h_{t-p} W_{h c}\right)+b_{c}\right) \\ &h_{t}=\left(1-u_{t}\right) \odot h_{t-p}+u_{t} \odot c_{t} \end{aligned}\).
- \(p\) : number of hidden cells skipped
(5) Dense Layer
combine outputs of
- 1) Recurrent components ( \(h_t^R\) )
- 2) Recurrent-skip components ( \(h_t^S\) )
output of dense layer :
- \(h_{t}^{D}=W^{R} h_{t}^{R}+\sum_{i=0}^{p-1} W_{i}^{S} h_{t-i}^{S}+b\).
(6) Temporal Attention Layer
Recurrent skip layer : needs “pre-defined hyperparameter \(p\)”
\(\rightarrow\) use attention instead! ( to make weighted combinations )
\(\boldsymbol{\alpha}_{t}=\operatorname{AttnScore}\left(H_{t}^{R}, h_{t-1}^{R}\right)\).
-
attention weight \(\boldsymbol{\alpha}_{t} \in \mathbb{R}^{q}\)
-
\(H_{t}^{R}=\left[h_{t-q}^{R}, \ldots, h_{t-1}^{R}\right]\) is a matrix stacking the hidden representation of RNN column-wisely
-
\(\text{AttnScore}\) : similarity functions
ex) dot product, cosine, or parameterized by a simple multi-layer perceptron…
Weighted Context vector : \(c_{t}=H_{t} \alpha_{t}\).
Final : \(h_{t}^{D}=W\left[c_{t} ; h_{t-1}^{R}\right]+b\).
(7) Autoregressive Component
capture non-linearity by “CNN” & “RNN”
\(\rightarrow\) but…. scale of output is not sensitive to scale of inputs!
Solution : decompose the final prediction of LSTNet into a…
- 1) linear part : to deal with local scaling issue ( \(h_{t}^{L}\) )
- use AR model for this!
- \(h_{t, i}^{L}=\sum_{k=0}^{q^{a r}-1} W_{k}^{a r} \boldsymbol{y}_{t-k, i}+b^{a r}\).
- 2) non-linear part : containing recurring patterns ( \(h_{t}^{D}\) )
Final Prediction : \(\hat{Y}_{t}=h_{t}^{D}+h_{t}^{L}\)
(8) Loss Function
\(\underset{\Theta}{\operatorname{minimize}} \sum_{t \in \Omega_{\text {Train }}} \mid \mid Y_{t}-\hat{Y}_{t-h}\mid \mid_{F}^{2}\).