
Univariate 2. 일반 선형확률 과정 ( General Linear Process ) (1)
“시계열 데이터 = 가우시안 백색잡음의 현재값과 과거값의 선형조합”*
\(Y_t = \epsilon_t + \psi_1\epsilon_{t-1} + \psi_2\epsilon_{t-2} + \cdots\).
where \(\epsilon_i \sim i.i.d.~WN(0, \sigma_{\epsilon_i}^2)~and~\displaystyle \sum_{i=1}^{\infty}\psi_i^2 < \infty\).
세부 알고리즘:
- WN(White Noise)
- MA(Moving Average)
- AR(Auto-Regressive)
- ARMA(Auto-Regressive Moving Average)
- ARMAX(ARMA with eXogenous variables)
1. WN (White Noise)
(1) White Noise (백색 잡음)의 2가지 특징
[1] 잔차 (Residual)는 정규분포를 따른다
-
1) 정규 분포
-
\(\begin{align*} \{\epsilon_t : t = \dots, -2, -1, 0, 1, 2, \dots\} \sim N(0,\sigma^2_{\epsilon_t}) \\ \end{align*}\).
where \(\epsilon_t \sim i.i.d\)
-
-
2) mean=0, var=constant
- \(\epsilon_t = Y_t - \hat{Y_t}\).
- \(E(\epsilon_t) = 0\).
- \(Var(\epsilon_t) = \sigma^2_{\epsilon_t}\).
- \(\epsilon_t = Y_t - \hat{Y_t}\).
[2] 잔차들이 시간의 흐름에 따라 “상관성이 없어야” 한다
- ACF (자기 상관 함수)를 통해 Autocorrelation=0인지 확인해야!
- 공분산 (Covariance)
- \(Cov(Y_s, Y_k)\) = \(E[(Y_s-E(Y_s))\)\((Y_k-E(Y_k))]\) = \(\gamma_{s,k}\)
- 자기상관함수 (Autocorrelation Function)
- \(Corr(Y_s, Y_k)\) = \(\dfrac{Cov(Y_s, Y_k)}{\sqrt{Var(Y_s)Var(Y_k)}}\) = \(\dfrac{\gamma_{s,k}}{\sqrt{\gamma_s \gamma_k}}\).
- 편자기상관함수 (Partial Autocorrelation Function)
- \(Corr[(Y_s-\hat{Y}_s, Y_{s-t}-\hat{Y}_{s-t})]\) for \(1<t<k\).
(2) Summary
-
강정상 과정(Stictly Stationary Process)
-
[공분산]
- lag(시차)=0 이면 \(\rightarrow\) 공분산 = 확률 분포의 분산
-
lag(시차)\(\neq\)0 이면 \(\rightarrow\) 공분산 = 0
- \(\gamma_i = \begin{cases} \text{Var}(\epsilon_t) & \;\; \text{ for } i = 0 \\ 0 & \;\; \text{ for } i \neq 0 \end{cases}\).
-
[자기상관계수]
- lag(시차)=0 이면 \(\rightarrow\) 자기상관계수 = 1
- lag(시차)\(\neq\)0 이면 \(\rightarrow\) 자기상관계수 = 0
- \(\rho_i = \begin{cases} 1 & \;\; \text{ for } i = 0 \\ 0 & \;\; \text{ for } i \neq 0 \end{cases}\).
(3) Example
from scipy import stats
import matplotlib.pyplot as plt
import numpy as np
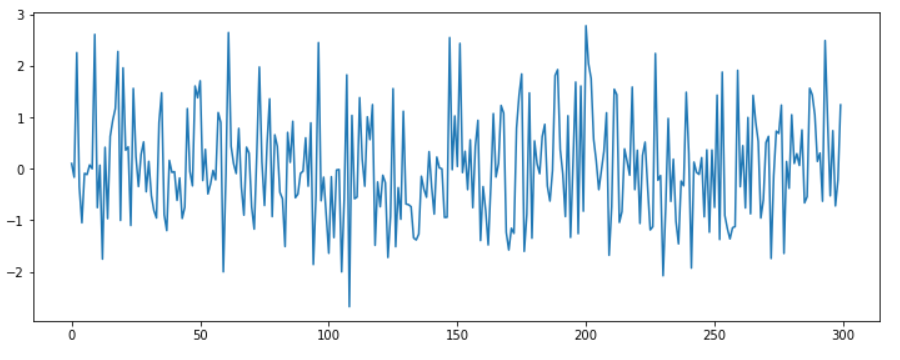
a) Gaussian WN
plt.plot(stats.norm.rvs(size=300))
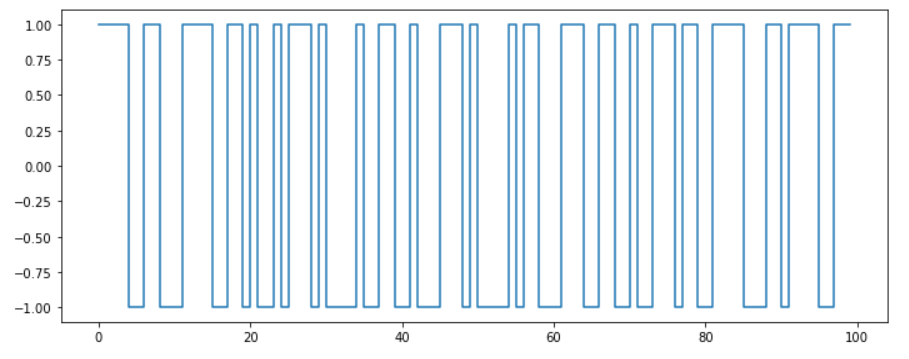
b) Bernoulli WN
( 반드시 Gaussian일 필요는 X )
samples = stats.bernoulli.rvs(0.5, size=100) * 2 - 1
plt.step(np.arange(len(samples)), samples)
plt.ylim(-1.1, 1.1)
2. MA (Moving Average)
(1) MA(\(q\))
알고리즘의 차수(\(q\))가 유한한 Gaussian WN의 Linear Combination
\(Y_t = \epsilon_t + \theta_1\epsilon_{t-1} + \theta_2\epsilon_{t-2} + \cdots + \theta_q\epsilon_{t-q}\).
- where \(\epsilon_i \sim i.i.d.~WN(0, \sigma_{\epsilon_i}^2)~and~\displaystyle \sum_{i=1}^{\infty}\theta_i^2 < \infty\)
위 식을 정리하자면…
\[\begin{align*} Y_t &= \epsilon_t + \theta_1\epsilon_{t-1} + \theta_2\epsilon_{t-2} + \cdots + \theta_q\epsilon_{t-q} \\ &= \epsilon_t + \theta_1L\epsilon_t + \theta_2L^2\epsilon_t + \cdots + \theta_qL^q\epsilon_t \\ &= (1 + \theta_1L + \theta_2L^2 + \cdots + \theta_qL^q)\epsilon_t \\ &= \theta(L)\epsilon_t \\ \end{align*}\]- where \(\epsilon_{t-1} = L\epsilon_t~and~\epsilon_{t-2} = L^2\epsilon_t\)
(2) MA(1)
\(Y_t = \epsilon_t + \theta_1\epsilon_{t-1}\).
( Mean & Variance )
- \(E(Y_t) = 0\).
- \(Var(Y_t)=\sigma_{\epsilon_i}^2 + \theta_1^2\sigma_{\epsilon_i}^2\).
( Covariance )
- \(Cov(Y_t, Y_{t-1})= \theta_1 \sigma_{\epsilon_{i}}^2\).
- \(Cov(Y_t, Y_{t-2})= 0\).
( Correlation )
- \(Corr(Y_t, Y_{t-1}) = \rho_1 = \dfrac{\theta_1}{1+\theta_1^2}\).
- \(Corr(Y_t, Y_{t-i}) = \rho_i = 0~~for~~i > 1\).
[ Proof ]
-
\(E(Y_t) = E(\epsilon_t + \theta_1\epsilon_{t-1}) = E(\epsilon_t) + \theta_1E(\epsilon_{t-1}) = 0\).
-
\(\begin{aligned} Var(Y_t) &= E[(\epsilon_t + \theta_1\epsilon_{t-1})^2]-0^2 \\ &= E(\epsilon_t^2) + 2\theta_1E(\epsilon_{t}\epsilon_{t-1}) + \theta_1^2E(\epsilon_{t-1}^2) \\ &= (\sigma_{\epsilon_i}^2 +0^2)+ 2 \theta_1 \cdot 0 + \theta_1^2 (\sigma_{\epsilon_i}^2 +0^2) \\ &= \sigma_{\epsilon_i}^2 + \theta_1^2\sigma_{\epsilon_i}^2 \end{aligned}\).
-
\(\begin{aligned}Cov(Y_t, Y_{t-1}) &= \gamma_1 \\&= \text{E} \left[ (\epsilon_t + \theta_1 \epsilon_{t-1})(\epsilon_{t-1} + \theta_1 \epsilon_{t-2}) \right] \\ &= E (\epsilon_t \epsilon_{t-1}) + \theta_1 E (\epsilon_t \epsilon_{t-2}) + \theta_1 E (\epsilon_{t-1}^2) + \theta_1^2 E (\epsilon_{t-1} \epsilon_{t-2}) \\ &= 0 + \theta_1 \cdot 0 + \theta_1 (\sigma_{\epsilon_{i}}^2+0^2) + \theta_1^2 \cdot 0 \\ &= \theta_1 \sigma_{\epsilon_{i}}^2\end{aligned}\).
-
\(\begin{aligned}Cov(Y_t, Y_{t-2}) &= \gamma_2 \\&= \text{E} \left[ (\epsilon_t + \theta_1 \epsilon_{t-1})(\epsilon_{t-2} + \theta_1 \epsilon_{t-3}) \right] \\ &= E (\epsilon_t \epsilon_{t-2}) + \theta_1 E (\epsilon_t \epsilon_{t-3}) + \theta_1 E (\epsilon_{t-1} \epsilon_{t-2}) + \theta_1^2 E (\epsilon_{t-1} \epsilon_{t-3}) \\ &= 0 + \theta_1 \cdot 0 + \theta_1 \cdot 0 + \theta_1^2 \cdot 0 \\ &= 0 \end{aligned}\).
(3) MA(2)
\(Y_t = \epsilon_t + \theta_1\epsilon_{t-1} + \theta_2\epsilon_{t-2}\).
( Mean & Variance )
- \(E(Y_t) =0\).
- \(Var(Y_t) = \sigma_{\epsilon_i}^2 + \theta_1^2\sigma_{\epsilon_i}^2 + \theta_2^2\sigma_{\epsilon_i}^2\).
( Covariance )
- \(Cov(Y_t, Y_{t-1}) = (\theta_1 + \theta_1\theta_2) \sigma_{\epsilon_{i}}^2\).
- \(Cov(Y_t, Y_{t-2}) =\theta_2 \sigma_{\epsilon_{i}}^2\).
- \(Cov(Y_t, Y_{t-i}) = \gamma_i = 0~~for~~i > 2\).
( Correlation )
- \(Corr(Y_t, Y_{t-1}) = \rho_1 = \dfrac{\theta_1 + \theta_1 \theta_2}{1+\theta_1^2+\theta_2^2}\).
- \(Corr(Y_t, Y_{t-2}) = \rho_2 = \dfrac{\theta_2}{1+\theta_1^2+\theta_2^2}\).
- \[Corr(Y_t, Y_{t-i}) = \rho_i = 0~~for~~i > 2\]
[ Proof ]
- \(E(Y_t) = E(\epsilon_t + \theta_1\epsilon_{t-1} + \theta_2\epsilon_{t-2}) = E(\epsilon_t) + \theta_1E(\epsilon_{t-1}) + \theta_2E(\epsilon_{t-2}) = 0\).
- \(\begin{aligned} Var(Y_t) &= E[(\epsilon_t + \theta_1\epsilon_{t-1} + \theta_2\epsilon_{t-2})^2] \\
&= (\sigma_{\epsilon_i}^2+0^2) + \theta_1^2(\sigma_{\epsilon_i}^2+0^2) + \theta_2^2(\sigma_{\epsilon_i}^2+0^2) \end{aligned}\).
- \(.\begin{aligned}Cov(Y_t, Y_{t-1}) &= \gamma_1 \\&= \text{E} \left[ (\epsilon_t + \theta_1 \epsilon_{t-1} + \theta_2\epsilon_{t-2})(\epsilon_{t-1} + \theta_1 \epsilon_{t-2} + \theta_2\epsilon_{t-3}) \right] \\
&= (\theta_1 + \theta_1\theta_2) \sigma_{\epsilon_{i}}^2 \end{aligned}\).
- \(\begin{aligned} Cov(Y_t, Y_{t-2}) &= \gamma_2 \\&= \text{E} \left[ (\epsilon_t + \theta_1 \epsilon_{t-1} + \theta_2\epsilon_{t-2})(\epsilon_{t-2} + \theta_1 \epsilon_{t-3} + \theta_2\epsilon_{t-4}) \right] \\
&= \theta_2 \sigma_{\epsilon_{i}}^2 \end{aligned}\).
- \(Cov(Y_t, Y_{t-i}) = \gamma_i = 0~~for~~i > 2\).
(4) MA(q)
\(\begin{aligned} Corr(Y_t, Y_{t-i}) = \rho_i &= \begin{cases} \dfrac{\theta_i + \theta_1\theta_{i-1} + \theta_2\theta_{i-2} + \cdots + \theta_q\theta_{i-q}}{1 + \theta_1^2 + \cdots + \theta_q^2} & \text{ for } i= 1, 2, \cdots, q \\ 0 & \text{ for } i > q \\ \end{cases} \end{aligned}\).
-
Stationarity Condition of MA(1): \(\mid \theta_1\mid < 1\)
-
Stationarity Condition of MA(2): \(\mid \theta_2\mid < 1\), \(\theta_1 + \theta_2 > -1\), \(\theta_1 - \theta_2 < 1\)
(5) Example
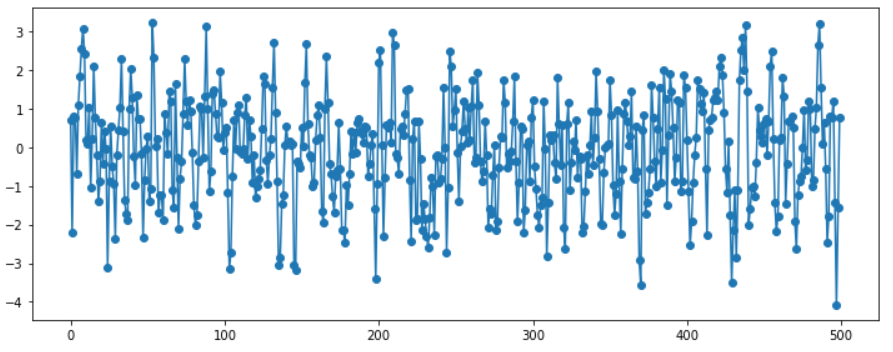
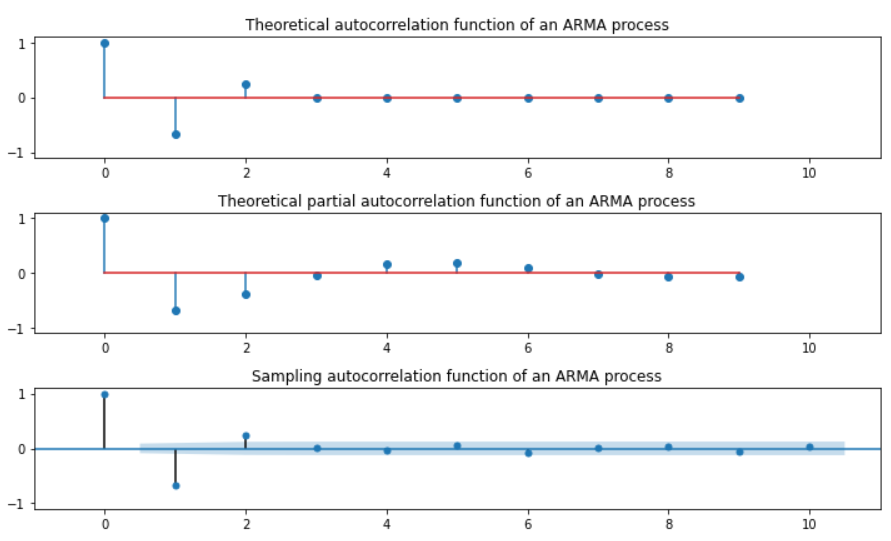
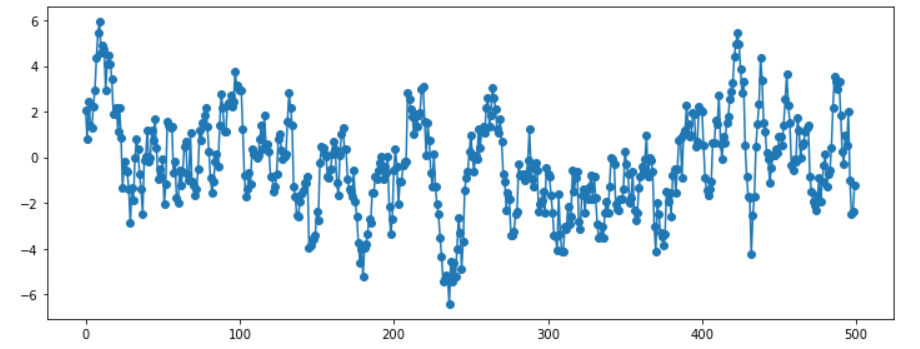
MA(1)
ar_params = np.array([])
ma_params = np.array([0.9])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------#
[1.]
[1. 0.9]
y = sm.tsa.ArmaProcess(ar, ma).generate_sample(500, burnin=50)
plt.plot(y, 'o-')
plt.stem().acf: auto correlation functionplt.stem().pacf: partial auto correlation functionsm.graphics.tsa.plot_acf: auto correlation function with SAMPLING
plt.figure(figsize=(10, 6))
plt.subplot(311)
plt.stem(sm.tsa.ArmaProcess(ar, ma).acf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical autocorrelation function of an ARMA process")
#----------------------------------------------------------------------#
plt.subplot(312)
plt.stem(sm.tsa.ArmaProcess(ar, ma).pacf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical partial autocorrelation function of an ARMA process")
#----------------------------------------------------------------------#
sm.graphics.tsa.plot_acf(y, lags=10, ax=plt.subplot(313))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Sampling autocorrelation function of an ARMA process")
plt.tight_layout()
plt.show()

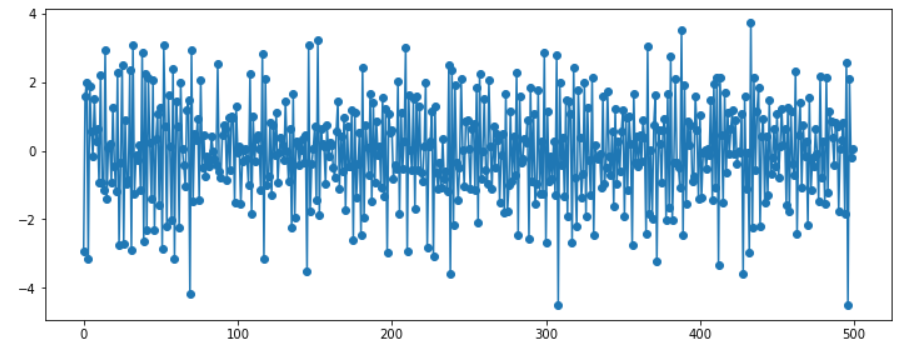
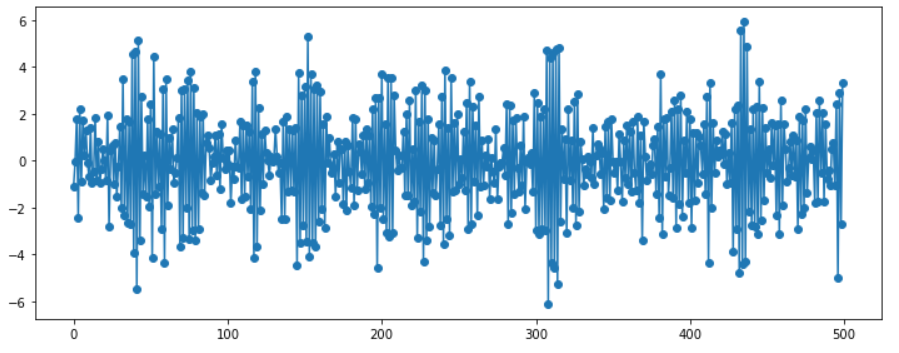
MA(2)
ar_params = np.array([])
ma_params = np.array([-1, 0.6])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------
[1.]
[ 1. -1. 0.6]
y = sm.tsa.ArmaProcess(ar, ma).generate_sample(500, burnin=50)
plt.plot(y, 'o-')
plt.figure(figsize=(10, 6))
plt.subplot(311)
plt.stem(sm.tsa.ArmaProcess(ar, ma).acf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical autocorrelation function of an ARMA process")
#----------------------------------------------------------------------#
plt.subplot(312)
plt.stem(sm.tsa.ArmaProcess(ar, ma).pacf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical partial autocorrelation function of an ARMA process")
#----------------------------------------------------------------------#
sm.graphics.tsa.plot_acf(y, lags=10, ax=plt.subplot(313))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Sampling autocorrelation function of an ARMA process")
plt.tight_layout()
plt.show()
3. AR (Auto-Regressive)
\(AR(p)\): 알고리즘의 차수(\(p\))가 유한한 자기자신의 과거값들의 Linear Combination
( 시차(Lag)가 증가해도 , ACF가 0이 되지 않는 경우, MA 모형을 사용할 경우 차수는 \(\infty\) 여야 하는 문제 상황! )
\(Y_t = \phi_1Y_{t-1} + \phi_2Y_{t-2} + \cdots + \phi_pY_{t-p} + \epsilon_t\).
- where \(\epsilon_i \sim i.i.d.~WN(0, \sigma_{\epsilon_i}^2)~and~\displaystyle \sum_{i=1}^{\infty}\phi_i^2 < \infty\)
위 식을 정리하면…
- \(Y_t - \phi_1Y_{t-1} - \phi_2Y_{t-2} - \cdots - \phi_pY_{t-p} = \epsilon_t\).
- \(Y_t - \phi_1LY_t - \phi_2L^2Y_t - \cdots - \phi_pL^pY_t= \epsilon_t\).
- \((1 - \phi_1L - \phi_2L^2 - \cdots - \phi_pL^p)Y_t = \epsilon_t\).
- \(\phi(L)Y_t = \epsilon_t\).
(1) AR(1)
\(Y_t = \phi_1 Y_{t-1} + \epsilon_t = MA(\infty)\).
( Mean & Variance )
- \(E(Y_t) = \mu = 0~~if~~\phi_1 \neq 1\).
- \(Var(Y_t) =\gamma_0= \dfrac{\sigma_{\epsilon_i}^2}{1-\phi_1^2}~~if~~\phi_1^2 \neq 1\).
( Covariance )
- \(Cov(Y_t, Y_{t-1})=\gamma_1 = \dfrac{\phi_1 \sigma_{\epsilon_{i}}^2}{1 - \phi_1^2}\).
- \(Cov(Y_t, Y_{t-2}) = \gamma_2 = \dfrac{\phi_1^2 \sigma_{\epsilon_{i}}^2}{1 - \phi_1^2}\).
( Correlation )
- \[Corr(Y_t, Y_{t-1}) = \rho_1 = \phi_1\]
- \(Corr(Y_t, Y_{t-2}) = \rho_2 = \phi_1^2\).
- \(Corr(Y_t, Y_{t-i}) = \rho_i = \phi_1^i\).
[ Proof는 생략 ]
Summary
- \(\phi_1 = 0\) : White Noise
- \(\phi_1 < 0\) : 부호를 바꿔가면서(진동하면서) 지수적으로 감소
- \(\phi_1 > 0\) : 시차가 증가하면서 자기상관계수는 지수적으로 감소
- \(\phi_1 = 1\): 비정상성인 Random Walk
- \(Y_t = Y_{t-1} + \epsilon_t\).
- \(Var(Y_t) > Var(Y_{t-1})\).
- Stationarity Condition: \(\mid \phi_1\mid < 1\)
(2) AR(2)
\(Y_t = \phi_1 Y_{t-1} + \phi_2 Y_{t-2} + \epsilon_t = MA(\infty)\).
( Mean & Variance )
- \(E(Y_t) = \mu = 0~~if~~\phi_1 + \phi_2 \neq 1\).
( Covariance(“Yule-Walker Equation”) )
- \(Cov(Y_t, Y_{t-1})= \phi_1 \gamma_{i-1} + \phi_2 \gamma_{i-2}\).
( Correlation )
- \(\begin{aligned}Corr(Y_t, Y_{t-i}) &= \rho_i \\&= \phi_1 \rho_{i-1} + \phi_2 \rho_{i-2}\end{aligned}\).
- \(\begin{aligned} \rho_1 &= \dfrac{\phi_1}{1-\phi_2} \\ & \vdots \\ \rho_2 &= \dfrac{\phi_1^2 + \phi_2(1-\phi_2)}{1-\phi_2} \\ & \vdots \\ \rho_i &= \left( 1+\dfrac{1+\phi_2}{1-\phi_2} \cdot i \right)\left(\dfrac{\phi_1}{2} \right)^i \end{aligned}\).
[ Proof는 생략 ]
Summary
-
시차가 증가하면서 자기상관계수의 절대값은 지수적으로 감소
- 진동 주파수에 따라 다르지만 진동 가능
- Stationarity Condition: \(\mid \phi_1\mid < 1\), \(\phi_1 + \phi_2 < 1\), \(\phi_2 - \phi_1 < 1\)
(3) Example
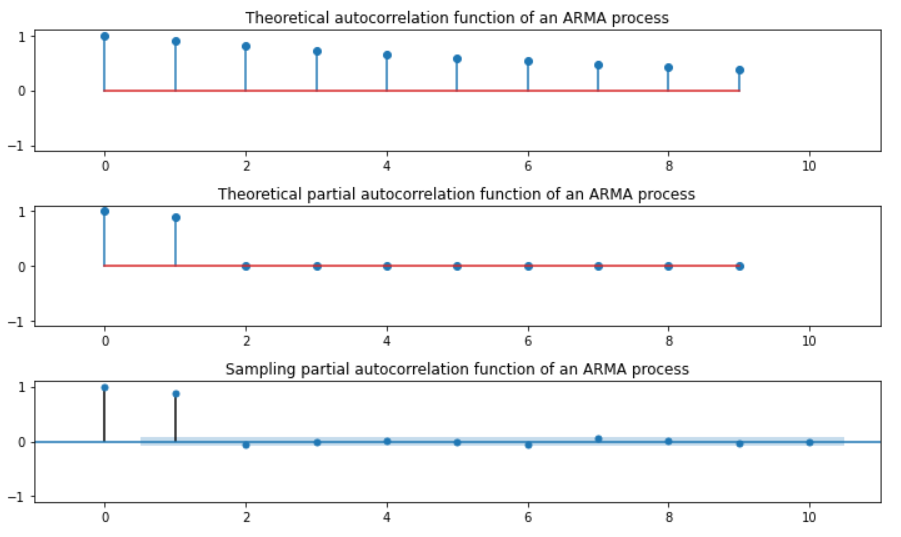
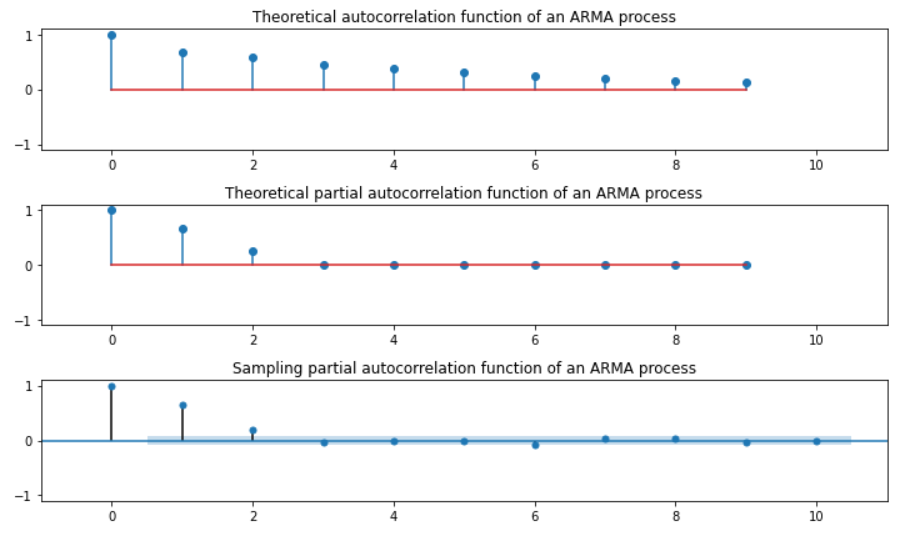
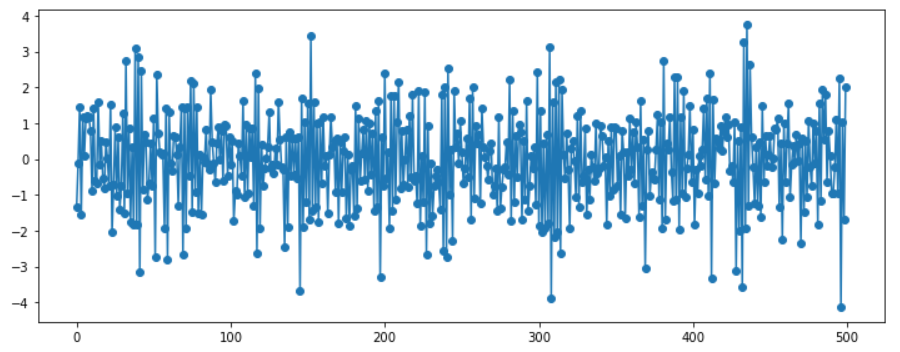
AR(1) .. \(\phi_1 = 0.9\)
ar_params = np.array([0.9])
ma_params = np.array([])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------------------------------
[ 1. -0.9]
[1.]
y = sm.tsa.ArmaProcess(ar, ma).generate_sample(500, burnin=50)
plt.plot(y, 'o-')
plt.figure(figsize=(10, 6))
plt.subplot(311)
plt.stem(sm.tsa.ArmaProcess(ar, ma).acf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical autocorrelation function of an ARMA process")
#------------------------------------------------------#
plt.subplot(312)
plt.stem(sm.tsa.ArmaProcess(ar, ma).pacf(lags=10))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
plt.title("Theoretical partial autocorrelation function of an ARMA process")
#------------------------------------------------------#
sm.graphics.tsa.plot_pacf(y, lags=10, ax=plt.subplot(313))
plt.xlim(-1, 11)
plt.ylim(-1.1, 1.1)
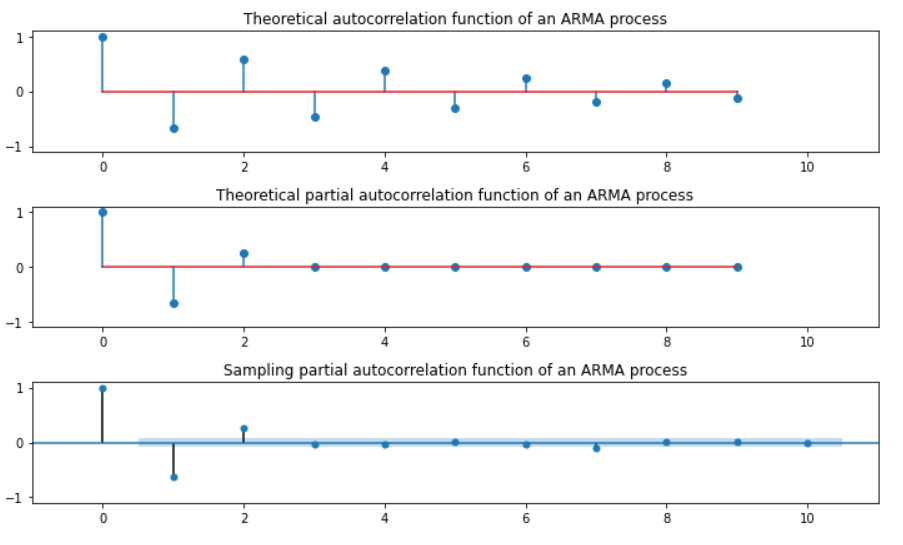
plt.title("Sampling partial autocorrelation function of an ARMA process")
plt.tight_layout()
plt.show()
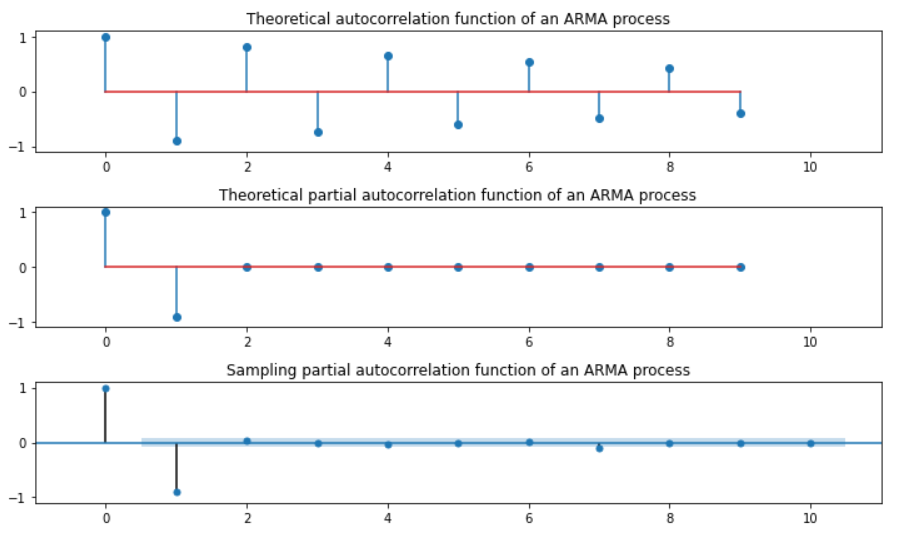
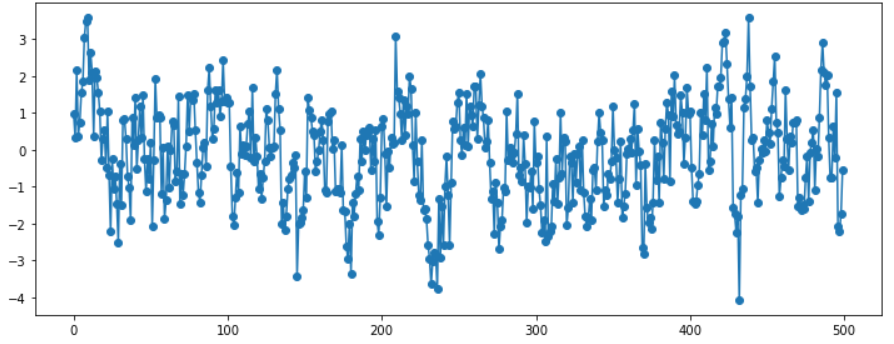
AR(1) .. \(\phi_1 = -0.9\)
ar_params = np.array([-0.9])
ma_params = np.array([])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------------------------------
[ 1. 0.9]
[1.]
( 이하 코드 동일 )
AR(2) … \(\phi_1 = 0.5, \phi_2=0.25\)
ar_params = np.array([0.5, 0.25])
ma_params = np.array([])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------------------------------
[ 1. -0.5, -0.25]
[1.]
( 이하 코드 동일 )
AR(2) … \(\phi_1 = -0.5, \phi_2=0.25\)
ar_params = np.array([-0.5, 0.25])
ma_params = np.array([])
ar, ma = np.r_[1, -ar_params], np.r_[1, ma_params]
print(ar)
print(ma)
#------------------------------------------------
[ 1. 0.5, -0.25]
[1.]
( 이하 코드 동일 )
4. Relation of MA & AR
가역성 조건(Invertibility Condition):
-
1) \(MA(q)\) -> \(AR(\infty)\): 변환 후, AR 모형이 Stationary Condition을 만족하면 **“가역성(Invertibility)” **
-
2) \(AR(p)\) -> \(MA(\infty)\): 여러개 모형변환 가능!
( BUT, “Invertibility” 조건을 만족하는 MA 모형은 ONLY 1개 )