
Variational Denoising Network : Toward Blind Noise Modeling and Removal ( NeurIPS 2019 )
Abstract
goal : Blind Image Denoising
method : new VI method
-
integrates both (1) noise estimation & (2) image denoising into unique Bayesian framework
-
approximate posterior : parameterized by DNN
-
intrinsic clean image & noise variances as latent variables,
conditioned on noisy input
Variational Denoising Network ( VDN )
- perform denoising efficienctly due to its explicit form of posterior
1. Introduction
Image denoising?
- recover underlying clean image of noisy one
2 main methods
- (1) MAP ( with loss & regularized terms )
- limitations due to assumption on image prior & noise
- (2) Deep Learning
- first, collect large amount of “noisy-clean image pairs”
- easy to overfit
Propose a new VI method!
- directly infer both (1) underlying clean image & (2) noise distn from a noisy image
2. Related Works
(1) model-driven MAP based
(2) data-driven Deep Learning based
Model-driven MAP based methods
- most classical image denoising methods
- fidelty/loss term & regularization
- pre-known image prior
Data-driven Deep Learning based Mtehods
- instead of pre-setting image prior, directly learn a denoiser
- input : large collection of noisy-clean image pair
3. Variational Denoising Network for Blind Noise Modeling
Training data \(D=\left\{\boldsymbol{y}_{j}, \boldsymbol{x}_{j}\right\}_{j=1}^{n}\).
- \(\boldsymbol{x}_{j}\) : clean image
- \(\boldsymbol{y}_{j}\) : noisy image
3-1. Constructing Full Bayesian Model based on training data
notation
- \(\boldsymbol{x}=\left[x_{1}, \cdots, x_{d}\right]^{T}\).
- \(\boldsymbol{y}=\left[y_{1}, \cdots, y_{d}\right]^{T}\).
- \(z \in \mathbb{R}^{d}\) :latent clean image
(1) generation process of noisy image :
- \(y_{i} \sim \mathcal{N}\left(y_{i} \mid z_{i}, \sigma_{i}^{2}\right), i=1,2, \cdots, d\).
(2) conjugate Gaussian prior on \(z\) :
- \(z_{i} \sim \mathcal{N}\left(z_{i} \mid x_{i}, \varepsilon_{0}^{2}\right), i=1,2, \cdots, d\).
(3) conjugate Inverse Gamma prior on \(\sigma^2\) :
- \(\sigma_{i}^{2} \sim \operatorname{IG}\left(\sigma_{i}^{2} \mid \frac{p^{2}}{2}-1, \frac{p^{2} \xi_{i}}{2}\right), i=1,2, \cdots, d\).
with (1) ~ (3) : full Bayesian model can be obtained.
Goal : Infer the posterior of latent variables \(z\) and \(\sigma^2\) from noisy image \(y\)
3-2. Variational Form of Posterior
Assume conditional independence between \(\sigma^2\) and \(z\)
\(q\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)=q(\boldsymbol{z} \mid \boldsymbol{y}) q\left(\boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)\).
- \(q(\boldsymbol{z} \mid \boldsymbol{y})=\prod_{i}^{d} \mathcal{N}\left(z_{i} \mid \mu_{i}\left(\boldsymbol{y} ; W_{D}\right), m_{i}^{2}\left(\boldsymbol{y} ; W_{D}\right)\right)\).
- \(q\left(\boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)=\prod_{i}^{d} \operatorname{IG}\left(\sigma_{i}^{2} \mid \alpha_{i}\left(\boldsymbol{y} ; W_{S}\right), \beta_{i}\left(\boldsymbol{y} ; W_{S}\right)\right)\).
where
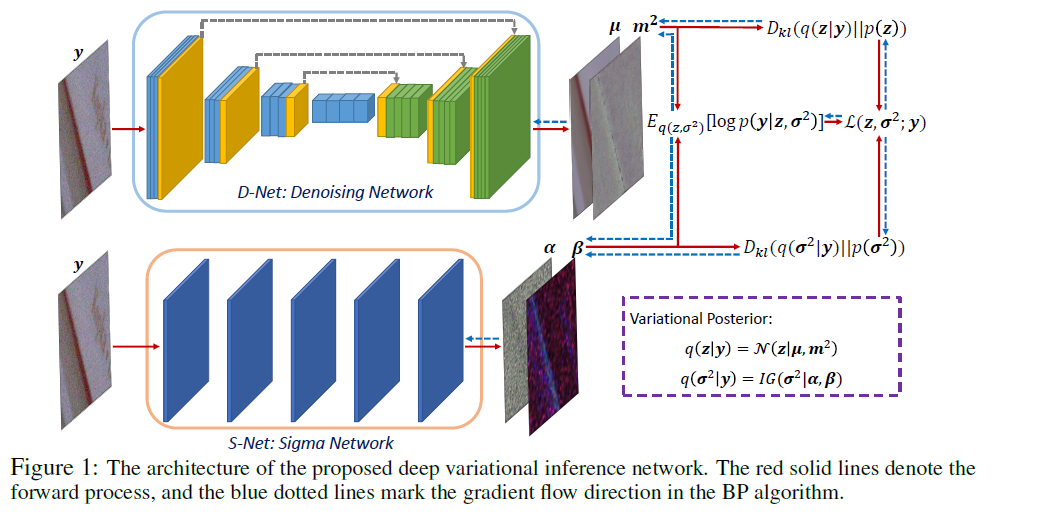
- \(\mu_{i}\left(\boldsymbol{y} ; W_{D}\right)\) and \(m_{i}^{2}\left(\boldsymbol{y} ; W_{D}\right)\) : posterior params of latent variable \(z\) ….. D-Net (Denoising)
- \(\alpha_{i}\left(\boldsymbol{y} ; W_{S}\right)\) and \(\beta_{i}\left(\boldsymbol{y} ; W_{S}\right)\) : posterior params of \(\sigma^2\) ……. S-Net (Sigma)
3-3. Variational Lower Bound of Marginal Data Likelihood
Decompose its marginal likelihood
-
\(\log p\left(\boldsymbol{y} ; \boldsymbol{z}, \boldsymbol{\sigma}^{2}\right)=\mathcal{L}\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} ; \boldsymbol{y}\right)+D_{K L}\left(q\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right) \mid \mid p\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)\right)\).
where \(\mathcal{L}\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} ; \boldsymbol{y}\right)=E_{q\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)}\left[\log p\left(\boldsymbol{y} \mid \boldsymbol{z}, \boldsymbol{\sigma}^{2}\right) p(\boldsymbol{z}) p\left(\boldsymbol{\sigma}^{2}\right)-\log q\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)\right]\) ( = ELBO )
-
\(\log p\left(\boldsymbol{y} ; \boldsymbol{z}, \boldsymbol{\sigma}^{2}\right) \geq \mathcal{L}\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} ; \boldsymbol{y}\right)\).
Rewrite
- \(\mathcal{L}\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} ; \boldsymbol{y}\right)=E_{q\left(\boldsymbol{z}, \boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right)}\left[\log p\left(\boldsymbol{y} \mid \boldsymbol{z}, \boldsymbol{\sigma}^{2}\right)\right]-D_{K L}(q(\boldsymbol{z} \mid \boldsymbol{y}) \mid \mid p(\boldsymbol{z}))-D_{K L}\left(q\left(\boldsymbol{\sigma}^{2} \mid \boldsymbol{y}\right) \mid \mid p\left(\boldsymbol{\sigma}^{2}\right)\right)\).
-
It can be integrated analytically!
-
Term 1)
\(E_{q\left(z, \sigma^{2} \mid y\right)}\left[\log p\left(\boldsymbol{y} \mid \boldsymbol{z}, \boldsymbol{\sigma}^{2}\right)\right]=\sum_{i=1}^{d}\left\{-\frac{1}{2} \log 2 \pi-\frac{1}{2}\left(\log \beta_{i}-\psi\left(\alpha_{i}\right)\right)-\frac{\alpha_{i}}{2 \beta_{i}}\left[\left(y_{i}-\mu_{i}\right)^{2}+m_{i}^{2}\right]\right\}\).
-
Term 2)
\(\begin{array}{c} D_{K L}(q(\boldsymbol{z} \mid \boldsymbol{y}) \mid \mid p(\boldsymbol{z}))=\sum_{i=1}^{d}\left\{\frac{\left(\mu_{i}-x_{i}\right)^{2}}{2 \varepsilon_{0}^{2}}+\frac{1}{2}\left[\frac{m_{i}^{2}}{\varepsilon_{0}^{2}}-\log \frac{m_{i}^{2}}{\varepsilon_{0}^{2}}-1\right]\right\} \end{array}\).
-
Term 3)
\(\begin{aligned} D_{K L}\left(q\left(\sigma^{2} \mid y\right) \mid \mid p\left(\sigma^{2}\right)\right)=\sum_{i=1}^{d}\left\{\left(\alpha_{i}\right.\right.&\left.-\frac{p^{2}}{2}+1\right) \psi\left(\alpha_{i}\right)+\left[\log \Gamma\left(\frac{p^{2}}{2}-1\right)-\log \Gamma\left(\alpha_{i}\right)\right] \\ &\left.+\left(\frac{p^{2}}{2}-1\right)\left(\log \beta_{i}-\log \frac{p^{2} \xi_{i}}{2}\right)+\alpha_{i}\left(\frac{p^{2} \xi_{i}}{2 \beta_{i}}-1\right)\right\} \end{aligned}\).
Final Objective Function : \(\min _{W_{D}, W_{S}}-\sum_{j=1}^{n} \mathcal{L}\left(z_{j}, \sigma_{j}^{2} ; y_{j}\right)\).
4. Conclusion
New Variational Inference Algorithm, called VDN(Variational Denoising Network) ,for blinding image denoising
Main Idea : learn an approximate posterior to the true posterior, with latent variables (clean image & noise variance)
proposed VDN is a generative method, which can estimate the noise distn from the input data.