
Prototypical Contrastive Learning of Unsupervised Representations
Contents
- Abstract
- Introduction
- PCL (Prototypical Contrastive Learning)
- Preliminaries
- PCL as EM
- Concentration Estimation \(\phi\)
0. Abstract
Prototypical Contrastive Learning (PCL)
-
bridge contrastive learning with clustering
-
not only learns low-level features for the task of instance discrimination,
but also encodes semantic structures discovered by clustering
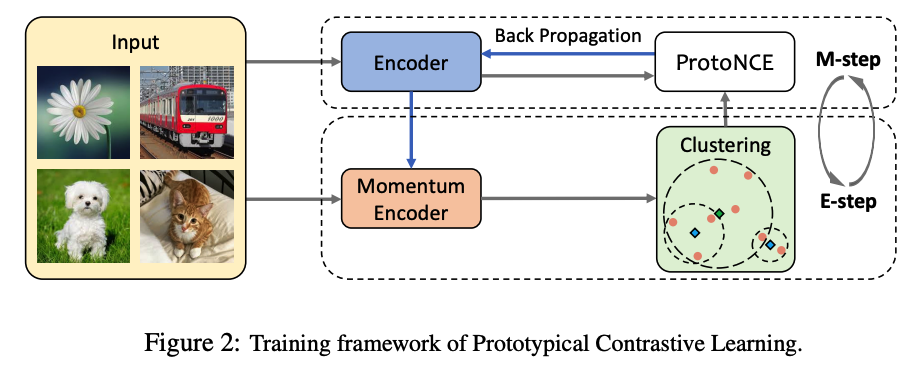
EM algorithm
[ E-step ] finding the distribution of prototypes via clustering
[ M-step ] optimizing the network via contrastive learning
ProtoNCE loss
- a generalized version of the InfoNCE loss for contrastive learning
- encourages representations to be closer to their assigned prototypes
1. Introduction
2. PCL (Prototypical Contrastive Learning)
(1) Preliminaries
Notation
- training set \(X=\left\{x_{1}, x_{2}, \ldots, x_{n}\right\}\) of \(n\) images
- embedding function \(f_{\theta}\)
- map \(X\) to \(V=\left\{v_{1}, v_{2}, \ldots, v_{n}\right\}\) with \(v_{i}=f_{\theta}\left(x_{i}\right)\)
Instance-wise Contrastive Learning :
- optimize InfoNCE (ex)
- \(\mathcal{L}_{\text {InfoNCE }}=\sum_{i=1}^{n}-\log \frac{\exp \left(v_{i} \cdot v_{i}^{\prime} / \tau\right)}{\sum_{j=0}^{r} \exp \left(v_{i} \cdot v_{j}^{\prime} / \tau\right)}\).
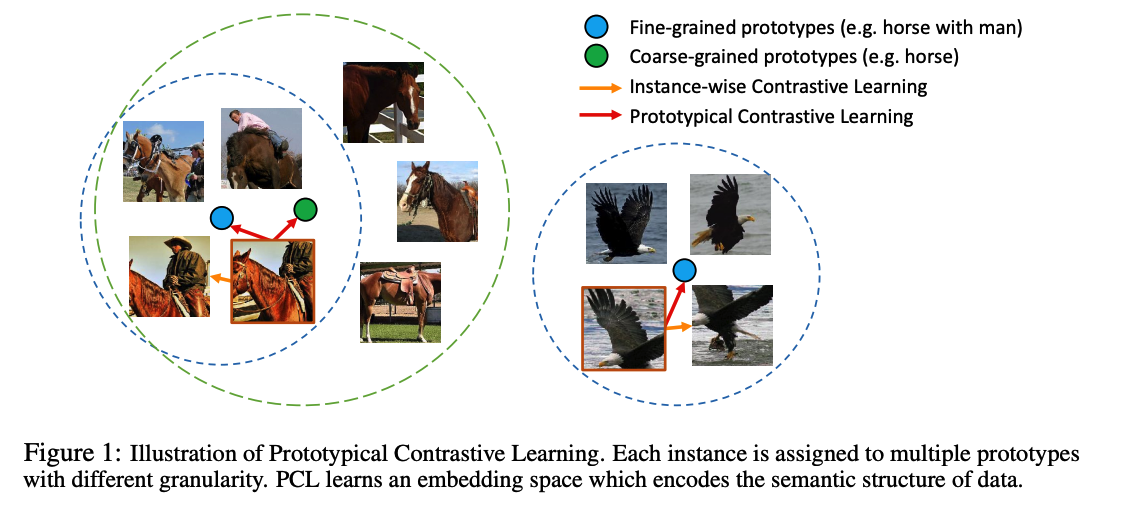
Prototypical Contrastive Learning
-
use prototypes \(c\) instead of \(v^{\prime}\)
-
replace the fixed temperature \(\tau\) with a per-prototype concentration estimation \(\phi\)
(2) PCL as EM
\(\theta^{*}=\underset{\theta}{\arg \max } \sum_{i=1}^{n} \log p\left(x_{i} ; \theta\right)=\underset{\theta}{\arg \max } \sum_{i=1}^{n} \log \sum_{c_{i} \in C} p\left(x_{i}, c_{i} ; \theta\right)\).
\(\rightarrow\) MLE : \(\theta^{*}=\underset{\theta}{\arg \min } \sum_{i=1}^{n}-\log \frac{\exp \left(v_{i} \cdot c_{s} / \phi_{s}\right)}{\sum_{j=1}^{k} \exp \left(v_{i} \cdot c_{j} / \phi_{j}\right)}\).
Loss Function
-
take the same approach as NCE
( sample \(r\) negative prototypes to calculate the normalization term )
-
also, cluster samples \(M\) times with different number of clusters \(K=\{k_m\}_{m=1}^M\)
-
Add InfoNCE loss to retain the property of local smoothness
\(\mathcal{L}_{\text {ProtoNCE }}=\sum_{i=1}^{n}-\left(\log \frac{\exp \left(v_{i} \cdot v_{i}^{\prime} / \tau\right)}{\sum_{j=0}^{r} \exp \left(v_{i} \cdot v_{j}^{\prime} / \tau\right)}+\frac{1}{M} \sum_{m=1}^{M} \log \frac{\exp \left(v_{i} \cdot c_{s}^{m} / \phi_{s}^{m}\right)}{\sum_{j=0}^{r} \exp \left(v_{i} \cdot c_{j}^{m} / \phi_{j}^{m}\right)}\right)\).
(3) Concentration Estimation \(\phi\)
desired \(\phi\) : should be SMALL, if
-
average distance between \(v_z^{'}\) and \(c\) is small
-
cluster contains more feature points ( \(i.e. Z\) is large )
\(\phi=\frac{\sum_{z=1}^{Z} \mid \mid v_{z}^{\prime}-c \mid \mid _{2}}{Z \log (Z+\alpha)}\).