CrossFormer: Transformer Utilizing Cross-dimension Dependency for MTS Forecasting
Contents
- Abstract
- Introduction
- Related Works
- MTS forecasting
- Transformers for MTS forecasting
- Vision Transformers
- Methodology
- Dimension-Segment-Wise Embedding
- Two-Stage Attention Layer
- Hierarchical Encoder-Decoder
- Experiments
- Main Results
- Ablation Study
0. Abstract
MTS forecasting
- Transformer-based models : can capture long-term dependency
\(\rightarrow\) however … mainly focus on modeling the temporal (cross-time) dependency
( omit the dependency among different variables ( = cross-dimension dependency ) )
Propose Crossformer
- Transformer-based model utilizing cross-dimension dependency for MTS forecasting.
Details:
-
(step 1) Input MTS is embedded into a 2D vector array
-
via Dimension-Segment-Wise (DSW) embedding
( to preserve time and dimension information )
-
-
(step 2) Two-Stage Attention (TSA) layer
- efficiently capture the cross-time & cross-dimension dependency
using both DSW & TSA, Crossformer establishes a Hierarchical Encoder-Decoder (HED) to use the information at different scales for the final forecasting
1. Introduction
Transformer for MTS forecasting:
- ability to capture long-term temporal dependency (cross-time dependency).
Cross-dimension dependency is also critical for MTS forecasting !
-
ex) previous neural models : explicitly capture the cross-dimension dependency, using CNN/GNN
-
However, recent Transformer-based models …
\(\rightarrow\) only implicitly utilize this dependency by embedding
-
generally embed data points in all dimensions at the same time step into a feature vector
& try to capture dependency among different time steps (Fig. 1 (b))
\(\rightarrow\) cross-time dependency is well captured, but cross-dimension dependency is not
-
Crossformer
a Transformer-based model that explicitly utilizes cross-dimension dependency for MTS forecasting.
-
(1) Dimension-Segment-Wise (DSW) embedding
-
to process the historical time series.
-
step 1) series in each dimension is partitioned into segments
-
step 2) embedded into feature vectors
( output = 2D vector array … two axes = time & dimension )
-
-
(2) Two-Stage-Attention (TSA) layer
- efficiently capture the cross-time & cross-dimension dependency
\(\rightarrow\) using (1) & (2) … establishes a Hierarchical Encoder-Decoder (HED)
-
each layer = each scale
-
[Encoder] upper layer = merges adjacent segments output by the lower layer
( capture coarser scale )
-
[Decoder] generate predictions at different scales & add them up as the final prediction.
Contribution
-
existing Transformer-based models : cross-dimension dependency is not well utilized
\(\rightarrow\) Without adequate and explicit mining and utilization of cross-dimension dependency, their forecasting capability is empirically shown limited.
-
develop Crossformer
-
extensive epperimental results
2. Related Works
(1) MTS forecasting
Divided into (1) statistical & (2) neural models
a) Statistical
- Vector auto-regressive (VAR) model
- Vector auto-regressive moving average (VARMA)
\(\rightarrow\) assume linear cross-dimension & cross-time dependency.
b) Neural models
- TCN (Lea et al., 2017) & DeepAR (Flunkert et al., 2017)
- treat the MTS data as a sequence of vectors and use CNN/RNN to capture the temporal dependency
- LSTnet (Lai et al., 2018)
- CNN : for cross-dimension dependency
- RNN : for cross-time dependency
- GNNs
- to capture the cross-dimension dependency explicitly for forecasting
- ex) MTGNN (Wu et al., 2020) :
- temporal convolution : cross-time
- graph convolution : cross-dimension
\(\rightarrow\) capture the cross-time dependency through CNN or RNN … difficulty in modeling long-term dependency
(2) Transformers for MTS forecasting
LogTrans (Li et al., 2019b)
- proposes the LogSparse attention ( reduces the computation complexity )
- from \(O\left(L^2\right)\) to \(O\left(L(\log L)^2\right)\)
Informer (Zhou et al., 2021)
- utilizes the sparsity of attention score through KL divergence estimation
- proposes ProbSparse self-attention
- achieves \(O(L \log L)\) complexity.
Autoformer (Wu et al., 2021a)
- introduces a decomposition architecture with an Auto-Correlation mechanism
- achieves the \(O(L \log L)\) complexity.
Pyraformer (Liu et al., 2021a)
- pyramidal attention module
- summarizes features at different resolutions & models the temporal dependencies of different ranges
- complexity of \(O(L)\).
FEDformer (Zhou et al., 2022)
- have a sparse representation in frequency domain
- develop a frequency enhanced Transformer
- \(O(L)\) complexity.
Preformer (Du et al., 2022)
- divides the embedded feature vector sequence into segments
- utilizes segment-wise correlation-based attention
\(\rightarrow\) These models mainly focus on reducing the complexity of cross-time dependency modeling,
but omits the **cross-dimension dependency
(3) Vision Transformers
**ViT (Dosovitskiy et al., 2021) **
-
one of the pioneers of vision transformers.
-
Basic idea of ViT
-
split an image into non-overlapping medium-sized patches
-
rearranges these patches into a sequence ( to be input to the Transformer )
-
Idea of partitiong images into patches
\(\rightarrow\) inspires our DSW embedding where MTS is split into dimension-wise segments
Swin Transformer (Liu et al., 2021b)
- performs local attention within a window ( to reduce the complexity )
- builds hierarchical feature maps by merging image patches
3. Methodology
Notation
- future value : \(\mathbf{x}_{T+1: T+\tau} \in\) \(\mathbb{R}^{\tau \times D}\)
- input value : \(\mathbf{x}_{1: T} \in \mathbb{R}^{T \times D}\)
- number of dimension : \(D>1\)
Section 3.1
- embed the MTS using Dimension-Segment-Wise (DSW) embedding
- To utilize the cross-dimension dependency
Section 3.2
- propose a Two-Stage Attention (TSA) layer
- to efficiently capture the dependency among the embedded segments
Section 3.3
- construct a hierarchical encoder-decoder (HED), using DSW embedding and TSA layer
- to utilize information at different scales
(1) Dimension-Segment-Wise Embedding
Embedding of the previous Transformer-based models for MTS forecasting ( Fig. 1 (b) )
- step 1) Embed data points at the same time step into a vector: \(\mathbf{x}_t \rightarrow \mathbf{h}_t, \mathbf{x}_t \in \mathbb{R}^D, \mathbf{h}_t \in \mathbb{R}^{d_{\text {model }}}\),
- \(\mathbf{x}_t\) : all the data points in \(D\) dimensions at step \(t\).
- input \(\mathbf{x}_{1: T}\) is embedded into \(T\) vectors \(\left\{\mathbf{h}_1, \mathbf{h}_2, \ldots, \mathbf{h}_T\right\}\).
- step 2) Dependency among the \(T\) vectors is captured for forecasting.
\(\rightarrow\) preivous methods mainly capture cross-time dependency
( cross-dimension dependency is not explicitly captured during embedding )
Fig. 1 (a)
- typical attention score map of original Transformer
- attention values have a tendency to segment, i.e. close data points have similar attention weights.
\(\rightarrow\) Argue that an embedded vector should represent a series segment of single dimension (Fig. 1 (c)), rather than the values of all dimensions at single step (Fig. 1 (b)).
propose Dimension-Segment-Wise (DSW) embedding
[ Step 1 ] Points in each dimension are divided into segments of length \(L_{s e g}\)
\(\begin{aligned} \mathbf{x}_{1: T} & =\left\{\mathbf{x}_{i, d}^{(s)} \mid 1 \leq i \leq \frac{T}{L_{\text {seg }}}, 1 \leq d \leq D\right\} \\ \mathbf{x}_{i, d}^{(s)} & =\left\{x_{t, d} \mid(i-1) \times L_{\text {seg }}<t \leq i \times L_{\text {seg }}\right\} \end{aligned}\).
- where \(\mathbf{x}_{i, d}^{(s)} \in \mathbb{R}^{L_{\text {seg }}}\) is the \(i\)-th segment in dimension \(d\) with length \(L_{\text {seg }}\).
[ Step 2 ] Each segment is embedded into a vector
-
using linear projection added with a position embedding
-
\(\mathbf{h}_{i, d}=\mathbf{E} \mathbf{x}_{i, d}^{(s)}+\mathbf{E}_{i, d}^{(p o s)}\).
- \(\mathbf{E} \in \mathbb{R}^{d_{\text {model }} \times L_{\text {seg }}}\) : the learnable projection matrix
- \(\mathbf{E}_{i, d}^{(\text {pos })} \in \mathbb{R}^{d_{\text {model }}}\) : the learnable position embedding for position \((i, d)\).
[ Output ] obtain a \(2 \mathrm{D}\) vector array \(\mathbf{H}=\left\{\mathbf{h}_{i, d} \mid 1 \leq i \leq \frac{T}{L_{\text {seg }}}, 1 \leq d \leq D\right\}\),
- each \(\mathbf{h}_{i, d}\) represents a univariate time series segment.
(2) Two-Stage Attention Layer
Flatten 2D array \(\mathbf{H}\) into 1D sequence
\(\rightarrow\) to be input to Trarnsformer architecture
Specific considerations:
-
(1) Different from images where the axes of height and width are interchangeable……
the axes of time and dimension for MTS have different meanings and thus should be treated differently
-
(2) Directly applying self-attention on \(2 \mathrm{D}\) array will cause the complexity of \(O\left(D^2 \frac{T^2}{L_{s e g}^2}\right)\) …..
which is unaffordable for large \(D\).
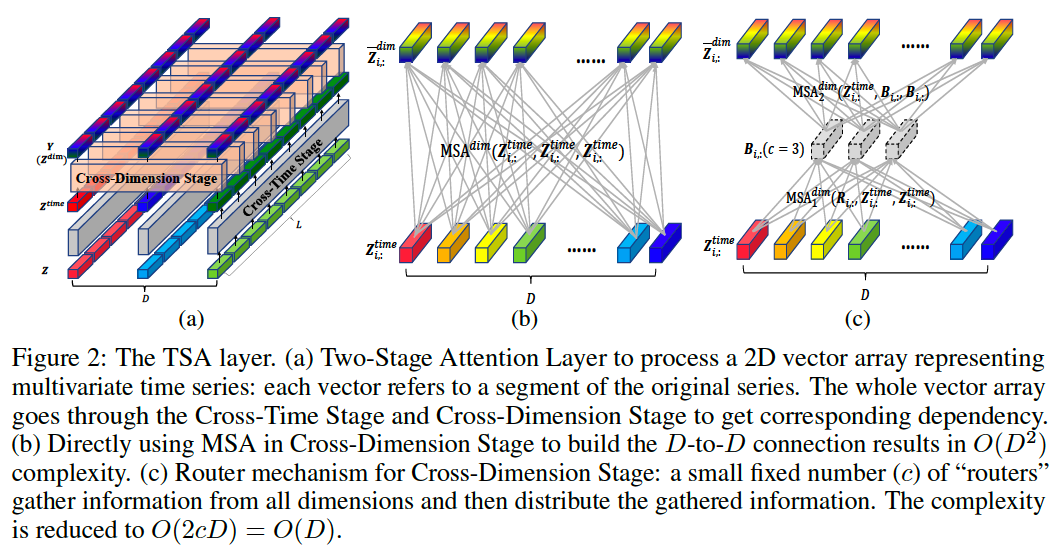
\(\rightarrow\) propose the Two-Stage Attention (TSA) Layer
- to capture cross-time and cross-dimension dependency
a) Cross-Time stage
Notation
-
Input : 2D array \(\mathbf{Z} \in \mathbb{R}^{L \times D \times d_{\text {model }}}\)
( = output of DSW embedding or lower TSA layers )
- \(L\) : number of segments
- \(D\): number of dimensions
-
\(\mathbf{Z}_{i,:}\) : vectors of all dimensions at time step \(i\)
-
\(\mathbf{Z}_{:, d}\) : vectors of all time steps in dimension \(d\).
Multi-head self-attention (MSA) to each dimension:
\(\begin{aligned} \hat{\mathbf{Z}}_{:, d}^{\text {time }} & =\text { LayerNorm }\left(\mathbf{Z}_{:, d}+\operatorname{MSA}^{\text {time }}\left(\mathbf{Z}_{:, d}, \mathbf{Z}_{:, d}, \mathbf{Z}_{:, d}\right)\right) \\ \mathbf{Z}^{\text {time }} & =\operatorname{LayerNorm}\left(\hat{\mathbf{Z}}^{\text {time }}+\operatorname{MLP}\left(\hat{\mathbf{Z}}^{\text {time }}\right)\right) \end{aligned}\).
- where \(1 \leq d \leq D\)
- all dimensions \((1 \leq d \leq D)\) share the same MSA layer
Computation complexity of cross-time stage = \(O\left(D L^2\right)\).
Dependency among time segments in the same dimension is captured in \(\mathbf{Z}^{\text {time }}\).
\(\rightarrow\) \(\mathbf{Z}^{\text {time }}\) becomes the input of Cross-Dimension Stage
b) Cross-Dimension stage
Cross-Time stage
-
we can use a large \(L_{\text {seg }}\) for long sequence in DSW Embedding
( to reduce the number of segments \(L\) in cross-time stage )
Cross-Dimension Stage
-
we can not partition dimensions and directly apply MSA
-
Instead, we propose the router mechanism for potentially large \(D\).
- set a small fixed number \((c<<D)\) of learnable vectors for each time step \(i\) as routers.
- complexity : \(O(D^2L) \rightarrow O(DL)\)
-
Routers
- step 1) aggregate messages from all dimensions
- step 2) distribute the received messages among dimensions
\(\rightarrow\) all-to-all connection among \(D\) dimensions are built:
\(\begin{aligned} \mathbf{B}_{i,:} & =\operatorname{MSA}_1^{d i m}\left(\mathbf{R}_{i,:}, \mathbf{Z}_{i,:}^{\text {time }}, \mathbf{Z}_{i,:}^{\text {time }}\right), 1 \leq i \leq L \\ \overline{\mathbf{Z}}_{i,:}^{d i m} & =\operatorname{MSA}_2^{d i m}\left(\mathbf{Z}_{i,:}^{\text {time }}, \mathbf{B}_{i,:}, \mathbf{B}_{i,:}\right), 1 \leq i \leq L \\ \hat{\mathbf{Z}}^{\text {dim }} & =\text { LayerNorm }\left(\mathbf{Z}^{\text {time }}+\overline{\mathbf{Z}}^{\text {dim }}\right) \\ \mathbf{Z}^{\text {dim }} & =\text { LayerNorm }\left(\hat{\mathbf{Z}}^{\text {dim }}+\operatorname{MLP}\left(\hat{\mathbf{Z}}^{d i m}\right)\right) \end{aligned}\).
- \(\mathbf{R} \in \mathbb{R}^{L \times c \times d_{\text {model }}}\) : learnable vector array ( = routers )
- \(\mathbf{B} \in \mathbb{R}^{L \times c \times d_{\text {model }}}\) : aggregated messages from all dimensions
- \(\overline{\mathbf{Z}}^{\text {dim }}\) : output of the router mechanism.
- \(\hat{\mathbf{Z}}^{\text {dim }}\) : output of skip connection
- \(\mathbf{Z}^{\text {dim }}\) : output of MLP
All time steps \((1 \leq i \leq L)\) share the same \(\mathrm{MSA}_1^{d i m}, \mathrm{MSA}_2^{\text {dim }}\).
\(\mathbf{Y}=\mathbf{Z}^{\text {dim }}=\mathrm{TSA}(\mathbf{Z})\).
- \(\mathbf{Z}\) : input vector array of TSA layer
- \(\mathbf{Y} \in \mathbb{R}^{L \times D \times d_{\text {model }}}\) : output vector array of TSA layer
Overall computation complexity of TSA layer
- \(O\left(D L^2+D L\right)=O\left(D L^2\right)\).
Summary
After the Cross-Time and Cross-Dimension Stages …
every two segments (i.e. \(\mathbf{Z}_{i_1, d_1}, \mathbf{Z}_{i_2, d_2}\) ) in \(\mathbf{Z}\) are connected,
\(\rightarrow\) both cross-time and cross-dimension dependencies are captured in \(\mathbf{Y}\).
(3) Hierarchical Encoder-Decoder
to capture information at different scales
use (1) DSW embedding & (2) TSA layer & (3) segment merging
\(\rightarrow\) to construct a Hierarchical Encoder-Decoder (HED).
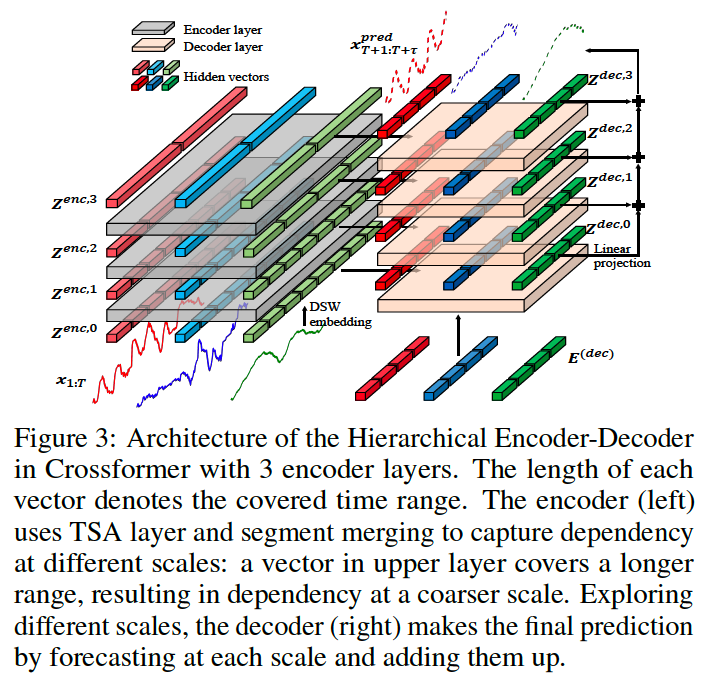
- Upper layer utilizes information at a coarser scale for forecasting.
- Final results = add forecasting values at different scales
a) Encoder
Coarser Level : every two adjacent vectors in time domain are merged
\(\rightarrow\) then, TSA layer is applied to capture dependency at this scale.
\(\mathbf{Z}^{e n c, l}=\operatorname{Encoder}\left(\mathbf{Z}^{e n c, l-1}\right)\).
Details :
\(\begin{aligned} & \left\{\begin{aligned} l=1: & \hat{\mathbf{Z}}^{e n c, l}=\mathbf{H} \\ l>1: & \hat{\mathbf{Z}}_{i, d}^{e n c, l}=\mathbf{M}\left[\mathbf{Z}_{2 i-1, d}^{e n c, l-1} \cdot \mathbf{Z}_{2 i, d}^{e n c, l-1}\right], 1 \leq i \leq \frac{L_{l-1}}{2}, 1 \leq d \leq D \end{aligned}\right. \\ & \mathbf{Z}^{e n c, l}=\operatorname{TSA}\left(\hat{\mathbf{Z}}^{e n c, l}\right) \\ & \end{aligned}\).
- \(\mathbf{H}\) : \(2 \mathrm{D}\) array obtained by DSW embedding
- \(\mathbf{Z}^{\text {enc,l }}\) : the output of the \(l\)-th encoder layer
- \(\mathbf{M} \in \mathbb{R}^{d_{\text {model }} \times 2 d_{\text {model }}}\) : a learnable matrix for segment merging
- \(L_{l-1}\) : the number of segments in each dimension in layer \(l-1\)
- \(\hat{\mathbf{Z}}^{e n c, l}\) : the array after segment merging in the \(i\)-th layer.
Suppose there are \(N\) layers in the encoder
\(\rightarrow\) use \(\mathbf{Z}^{\text {enc }, 0}, \mathbf{Z}^{\text {enc,1 }}, \ldots, \mathbf{Z}^{\text {enc, }, N},\left(\mathbf{Z}^{\text {enc }, 0}=\mathbf{H}\right)\) to represent the \(N+1\) outputs of the encoder.
- complexity of each encoder layer : \(O\left(D \frac{T^2}{L_{\text {seg }}^2}\right)\).
b) Decoder
Output of encoder : \(N+1\) feature arrays
Layer \(l\) of decoder :
- Input : \(l\)-th encoded array
- Output : decoded \(2 \mathrm{D}\) array of layer \(l\).
Summary : \(\mathbf{Z}^{\text {dec }, l}=\operatorname{Decoder}\left(\mathbf{Z}^{\text {dec }, l-1}, \mathbf{Z}^{\text {enc }, l}\right)\) :
Linear projection is applied to each layer’s output
- to yield the prediction of each layer
Layer predictions
- summed to make the final prediction (for \(l=0, \ldots, N\) ):
\(\begin{gathered} \text { for } l=0, \ldots, N: \mathbf{x}_{i, d}^{(s), l}=\mathbf{W}^l \mathbf{Z}_{i, d}^{\text {dec, }, l} \quad \mathbf{x}_{T+1: T+\tau}^{\text {pred,l }}=\left\{\mathbf{x}_{i, d}^{(s), l} \mid 1 \leq i \leq \frac{\tau}{L_{\text {seg }}}, 1 \leq d \leq D\right\} \\ \mathbf{x}_{T+1: T+\tau}^{\text {pred }}=\sum_{l=0}^N \mathbf{x}_{T+1: T+\tau}^{\text {pred, }} \end{gathered}\).
- \(\mathbf{W}^l \in \mathbb{R}^{L_{s e g} \times d_{\text {model }}}\) : a learnable matrix to project a vector to a time series segment.
- \(\mathbf{x}_{i, d}^{(s), l} \in \mathbb{R}^{L_{s e g}}\) : the \(i\)-th segment in dimension \(d\) of the prediction
4. Experiments
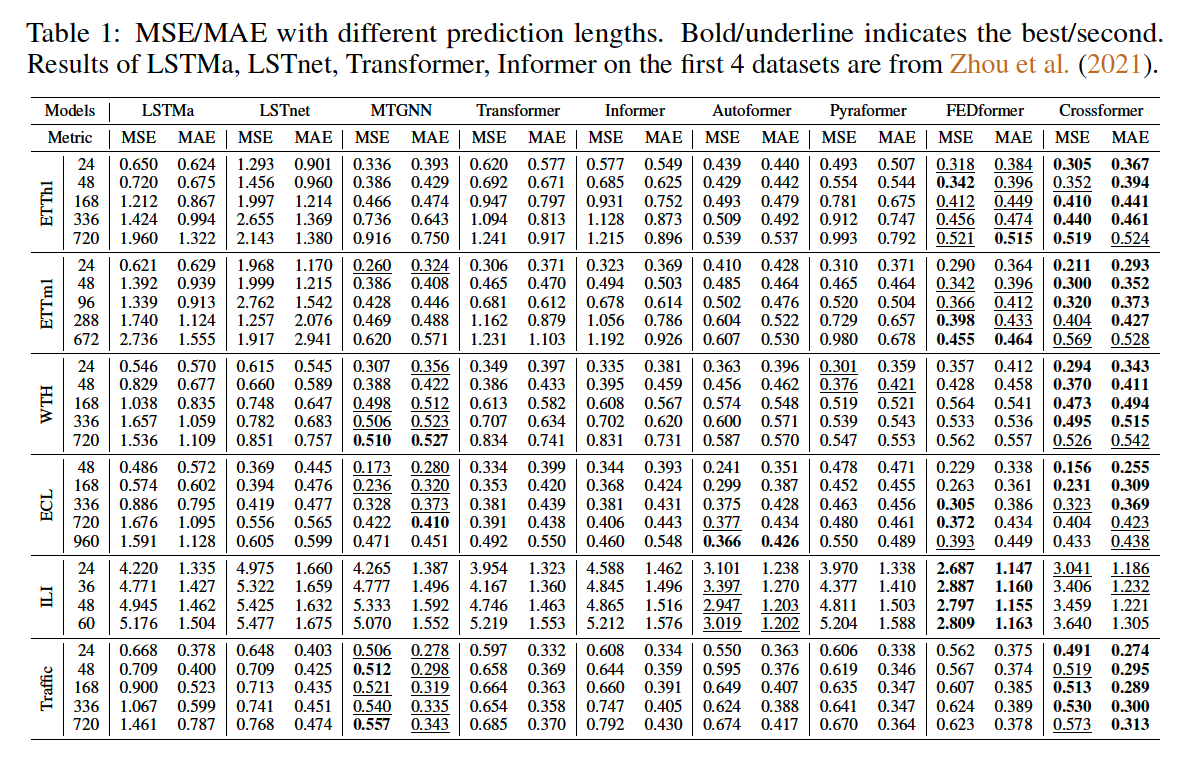
(1) Main Results
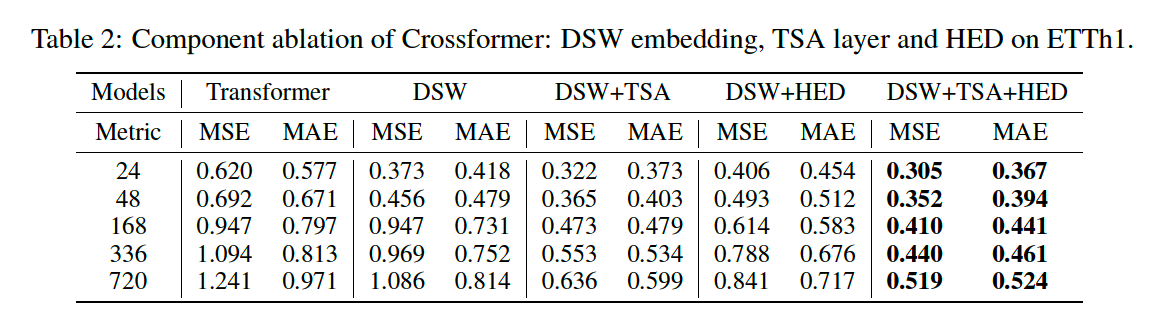
(2) Ablation Study