( 참고 : 패스트 캠퍼스 , 한번에 끝내는 컴퓨터비전 초격차 패키지 )
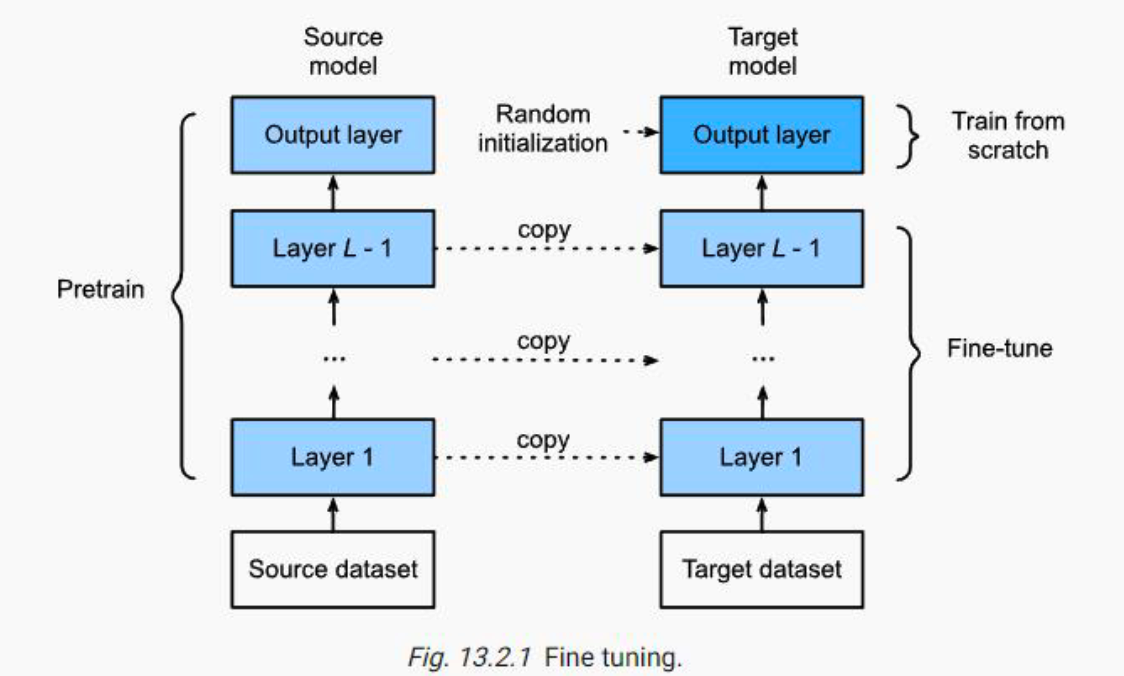
03.Transfer Learning
Much less dataset!! how to solve?
\(\rightarrow\) Transfer Learning!
1. Backbone of U-Net Encoder
backbone : VGG16
How does the architeture of backbone (VGG16) look like?
backbone = models.vgg16_bn(pretrained=False).features
backbone
Output exceeds the size limit. Open the full output data in a text editor
Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU(inplace=True)
(6): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(7): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(9): ReLU(inplace=True)
(10): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
...
(40): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(41): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(42): ReLU(inplace=True)
(43): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(1) Encoder of U-Net
class Encoder(nn.Module):
def __init__(self, pretrained):
super().__init__()
backbone = models.vgg16_bn(pretrained=pretrained).features
self.conv_block1 = nn.Sequential(*backbone[:6]) # use pre-trained weight
self.conv_block2 = nn.Sequential(*backbone[6:13])
self.conv_block3 = nn.Sequential(*backbone[13:20])
self.conv_block4 = nn.Sequential(*backbone[20:27])
self.conv_block5 = nn.Sequential(*backbone[27:34],
ConvLayer(512, 1024, kernel_size=1, padding=0))
def forward(self, x):
encode_features = [] # for connection to the DECODER part
out = self.conv_block1(x)
encode_features.append(out) # add
out = self.conv_block2(out)
encode_features.append(out) # add
out = self.conv_block3(out)
encode_features.append(out) # add
out = self.conv_block4(out)
encode_features.append(out) # add
out = self.conv_block5(out)
return out, encode_features
2. Weight Initialization ( vs Transfer Learning )
How to initialize all the parameters in model at once?
( with He initialization )
def He_initialization(module):
if isinstance(module, torch.nn.Conv2d):
torch.nn.init.kaiming_normal_(module.weight)
elif isinstance(module, torch.nn.BatchNorm2d):
module.weight.data.fill_(1.0)
model = UNet(num_classes=NUM_CLASSES, pretrained=False)
#--------------------------------------------------------#
model.apply(weight_He_initialization)
#--------------------------------------------------------#
3. Weight transfer with freezing encoder layer
model = UNet(num_classes=NUM_CLASSES, pretrained=True)
model = model.to(DEVICE)
#--------------------------------------------------------#
model.encoder.requires_grad_ = False
#--------------------------------------------------------#
4. Fine Tuning