Domain-Adversarial Training of Neural Networks ( 2015, 4320 )
Contents
- Abstract
- Introduction
- Domain Adaptation
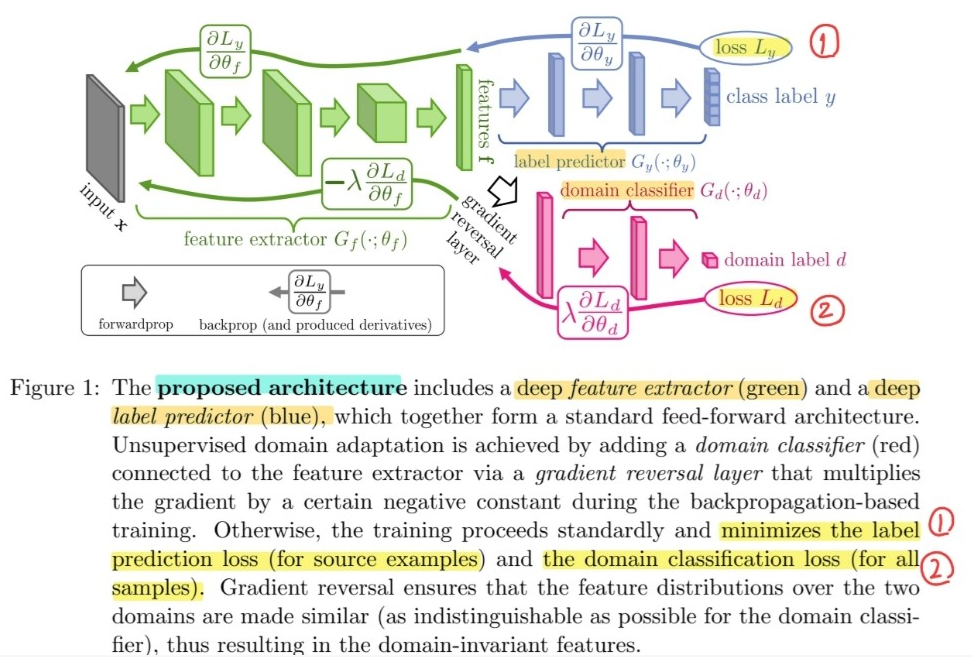
- DANN (Domain Adaptation NN)
0. Abstract
data at train & test time : “different distn”
- train = SOURCE domain
- labeled data
- test = TARGET domain
- unlabeled ( or few-labeled ) data
Features :
- 1) “discriminative” for main learning task ( on source domain )
- 2) “indiscriminative” w.r.t shift between domains
Example ) used in…
- 1) document sentiment analysis
- 2) image classification
1. Introduction
Costly to generate labeled data!
Domain Adaptation (DA)
- learning a discriminative predictor, in the presence of “shift between train/test distributions”
- mapping between domains, where target domain data are..
- 1) fully unlabeled : UNSUPERVISED DA
- 2) few-labeled : SEMI-SUPERVISED DA
This paper focus on learning features, that combine
- (1) discriminativeness
- (2) domain invariance
by using..
-
1) label predictor
- MINIMIZE loss of label classifier
-
2) domain classifier
- MAXIMIZE loss of domain classifier
( works adversarially )
\(\rightarrow\) encourages “domain invariant” features
2. Domain Adaptation
Notation
- \(X\) : input space
- \(Y=\{0,1, \ldots, L-1\}\) : set of \(L\) possible labels
- 2 different distributions over \(X \times Y\)
- 1) Source domain : \(\mathcal{D}_{\mathrm{S}}\)
- 2) Target domain : \(\mathcal{D}_{\mathrm{T}}\)
Unsupervised DA
-
given…
-
1) \(n\) labeled source samples … \(S \sim \mathcal{D}_{\mathrm{S}}\)
-
2) \(n^{'}\) unlabeled target samples … \(T \sim \mathcal{D}_{\mathrm{T}}^{X}\)
( \(\mathcal{D}_{\mathrm{T}}^{X}\) = marginal distn of \(\mathcal{D}_{\mathrm{T}}\) over \(X\) )
-
-
notation
- \(S=\left\{\left(\mathbf{x}_{i}, y_{i}\right)\right\}_{i=1}^{n} \sim\left(\mathcal{D}_{\mathrm{S}}\right)^{n}\).
- \(T=\left\{\mathbf{x}_{i}\right\}_{i=n+1}^{N} \sim\left(\mathcal{D}_{\mathrm{T}}^{X}\right)^{n^{\prime}}\).
- total # of data : \(N = n+n^{'}\).
-
Goal
-
build a classifier \(\eta: X \rightarrow Y\),
with a low target risk : \(R_{\mathcal{D}_{\mathrm{T}}}(\eta)=\operatorname{Pr}_{(\mathrm{x}, y) \sim \mathcal{D}_{\mathrm{T}}}(\eta(\mathrm{x}) \neq y)\)
-
(1) Domain Divergence
( several notions of distance have been proposed for DA )
Goal :
-
minimize “target domain error”
-
upper bound of target domain error
= “source domain error” + “domain divergence”
\(\rightarrow\) (1) classify well in source domain & (2) minimize domain divergence
a) \(\mathcal{H}\) - divergence
- \(d_{\mathcal{H}}\left(\mathcal{D}_{\mathrm{S}}^{X}, \mathcal{D}_{\mathrm{T}}^{X}\right)=2 \sup _{\eta \in \mathcal{H}} \mid \underset{\mathbf{x} \sim \mathcal{D}_{\mathrm{S}}^{X}}{\operatorname{Pr}}[\eta(\mathbf{x})=1]-\underset{\mathbf{x} \sim \mathcal{D}_{\mathrm{T}}^{X}}{\operatorname{Pr}}[\eta(\mathbf{x})=1] \mid\).
b) empirical \(\mathcal{H}\) - divergence
- \(\hat{d}_{\mathcal{H}}(S, T)=2\left(1-\min _{\eta \in \mathcal{H}}\left[\frac{1}{n} \sum_{i=1}^{n} I\left[\eta\left(\mathbf{x}_{i}\right)=0\right]+\frac{1}{n^{\prime}} \sum_{i=n+1}^{N} I\left[\eta\left(\mathbf{x}_{i}\right)=1\right]\right]\right)\).
3. DANN (Domain Adaptation NN)