
A DIRT-T Approach to Unsupervised Domain Adaptation ( 2018, 380 )
Contents
- Abstract
- Introduction
- Limitation of Domain Adversarial Training
- Constraining via “Conditional Entropy Minimization”
- Decision Boundary Iterative Refinement Training (DIRT)
- Summary
0. Abstract
Domain Adaptation
- leveraging “labeled data” in source domain
- to learn an accurate model for “TARGET domain” ( where labels are scarce )
Domain Adversarial Training
induce “feature extractor”…
- that matches the “source & target feature” distributions in some feature space
2 Limitations
-
1) if feature extractor has “high capacity”
\(\rightarrow\) feature disn matching is a weak constraint
-
2) in “non-conservative DA”
( = NO single classifier works well for both domain )
\(\rightarrow\) training the to “do well on source domain” hurts performance on target domain
propose 2 models
- 1) VADA ( Virtual Adversarial Domain Adaptation )
- 2) DIRT-T ( Decision-boundary Iterative Refinement Training with a Teacher)
1. Introduction
consider a challenging setting… “non-conservative DA”
non-conservative DA
- 1) provided with…
- “fully-labeled SOURCE data”
- “completely-unlabeled TARGET data”
- 2) existence of classifier with LOW ERROR on BOTH DOMAIN is not guaranteed
( \(\leftrightarrow\) existence of classifier that works well on both )
Previous works
Ganin & Lempitsky (2015)
- constrain the classifier, to rely on “domain-invariant features”
- employ “domain adversarial training”
\(\rightarrow\) tackle the 2 problems of this ( in Abstract )
Saito et al (2017)
- replace “domain adversarial training” with asymmetric tri-training(ATT)
- assumption : target samples, labeled by source-classifier with HIGH confidence, are “correctly labeled”
This paper
- consider an orthogonal assumption, “CLUSTER ASSUMPTION”
- input distribution = separated data clusters
- data in data cluster = share same class label
- input distribution = separated data clusters
- based on this assumption, propose..
- 1) VADA ( Virtual Adversarial DA )
- VADA = (1) “additional virtual adversarial training” + (2) “conditional entropy loss”
- 2) DIRT-T ( Decision-boundary Iterative Refinement Training with a Teacher )
- use natural gradients to further refine the output of VADA
- focus purely on “target domain”
- 1) VADA ( Virtual Adversarial DA )
VADA & DIRT-T
[ conservative DA ]
-
classifier is trained to perform well on “SOURCE” domain
-
use VADA to “further constrain” the hypothesis space,
by penalizing violations of the cluster assumption
[ non-conservative DA ]
- mismatch between source & target optimal classifiers
- use DIRT-T to transit from joint classifier \(\rightarrow\) better “TARGET” domain classifier
2. Limitation of Domain Adversarial Training
“Domain Adversarial Training is NOT SUFFICIENT”
- especially, when “feature extractor has HIGH capacity”
Classifier ( \(h=g \circ f\) )
- 1) embedding function : \(f_{\theta}: \mathcal{X} \rightarrow \mathcal{Z}\)
- 2) embedding classifier : \(g_{\theta}: \mathcal{Z} \rightarrow \mathcal{C}\)
Notation
- ( source domain ) \(\mathcal{D}_{s}\): joint distn over input \(x\) & one-hot label \(y\)
- \(X_{s}\) : marginal input distribution
- ( target domain ) \(\left(\mathcal{D}_{t}, X_{t}\right)\) : ~
- \(\left(\mathcal{L}_{s}, \mathcal{L}_{d}\right)\) : loss function
Loss Function
- (1) cross-entropy objective
- \(\mathcal{L}_{y}\left(\theta ; \mathcal{D}_{s}\right) =\mathbb{E}_{x, y \sim \mathcal{D}_{s}}\left[y^{\top} \ln h_{\theta}(x)\right]\) .
- (2) domain discriminator (\(D\)) loss
- \(\mathcal{L}_{d}\left(\theta ; \mathcal{D}_{s}, \mathcal{D}_{t}\right) =\sup _{D} \mathbb{E}_{x \sim \mathcal{D}_{s}}\left[\ln D\left(f_{\theta}(x)\right)\right]+\mathbb{E}_{x \sim \mathcal{D}_{t}}\left[\ln \left(1-D\left(f_{\theta}(x)\right)\right)\right]\).
\(\rightarrow\) Total loss : \(\min _{\theta} \mathcal{L}_{y}\left(\theta ; \mathcal{D}_{s}\right)+\lambda_{d} \mathcal{L}_{d}\left(\theta ; \mathcal{D}_{s}, \mathcal{D}_{t}\right)\)
but what if \(f\) is toooo flexible??
\(\rightarrow\) does not imply high accuracy on “target task”
3. Constraining via “Conditional Entropy Minimization”
Cluster Assumption
- input distn \(X\) contains clusters
- points inside same cluster come from same class
If this assumption holds, optimal decision boundaries should occur FAR AWAY from data-dense regions
\(\rightarrow\) achieve this by “minimization of CONDITIONAL ENTROPY, w.r.t target distribution”
( = force the classifier to be confident on target data )
- \(\mathcal{L}_{c}\left(\theta ; \mathcal{D}_{t}\right)=-\mathbb{E}_{x \sim \mathcal{D}_{t}}\left[h_{\theta}(x)^{\top} \ln h_{\theta}(x)\right]\).
How to estimate conditional entropy?
-
must be “empirically estimated” using available data
-
but…this approximation breaks down, “if classifier \(h\) is not locally-Licpschitz”
-
thus, add additional term to loss function :
\(\mathcal{L}_{v}(\theta ; \mathcal{D})=\mathbb{E}_{x \sim \mathcal{D}}\left[\max _{ \mid \mid r \mid \mid \leq \epsilon} \mathrm{D}_{\mathrm{KL}}\left(h_{\theta}(x) \mid \mid h_{\theta}(x+r)\right)\right]\).
-
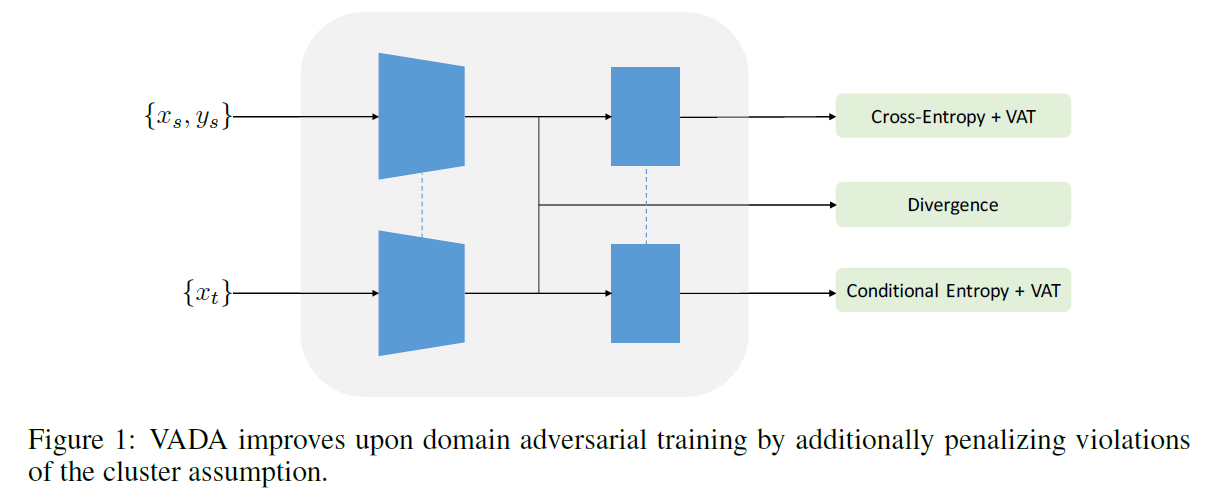
Final Loss Function ( of VADA )
- \(\min _{\theta} \mathcal{L}_{y}\left(\theta ; \mathcal{D}_{s}\right)+\lambda_{d} \mathcal{L}_{d}\left(\theta ; \mathcal{D}_{s}, \mathcal{D}_{t}\right)+\lambda_{s} \mathcal{L}_{v}\left(\theta ; \mathcal{D}_{s}\right)+\lambda_{t}\left[\mathcal{L}_{v}\left(\theta ; \mathcal{D}_{t}\right)+\mathcal{L}_{c}\left(\theta ; \mathcal{D}_{t}\right)\right]\).
- 1) \(\mathcal{L}_{y}\left(\theta ; \mathcal{D}_{s}\right)\) : CE loss
- 2) \(\mathcal{L}_{d}\left(\theta ; \mathcal{D}_{s}, \mathcal{D}_{t}\right)\) : domain discriminator loss
- 3) \(\mathcal{L}_{v}\left(\theta ; \mathcal{D}_{s}\right)\) : term for “locally-Lipschitz” ( for SOURCE )
- 4) \(\mathcal{L}_{v}\left(\theta ; \mathcal{D}_{t}\right)+\mathcal{L}_{c}\left(\theta ; \mathcal{D}_{t}\right)\) : term for “locally-Lipschitz” & “conditional entropy” ( for TARGET )
4. Decision Boundary Iterative Refinement Training (DIRT)
Optimal classifier in source domain, does not coincide with the optimal classifier in target domain
Any source-optimal classifier drawn from our hypothesis space necessarily violates the cluster assumption in target domain
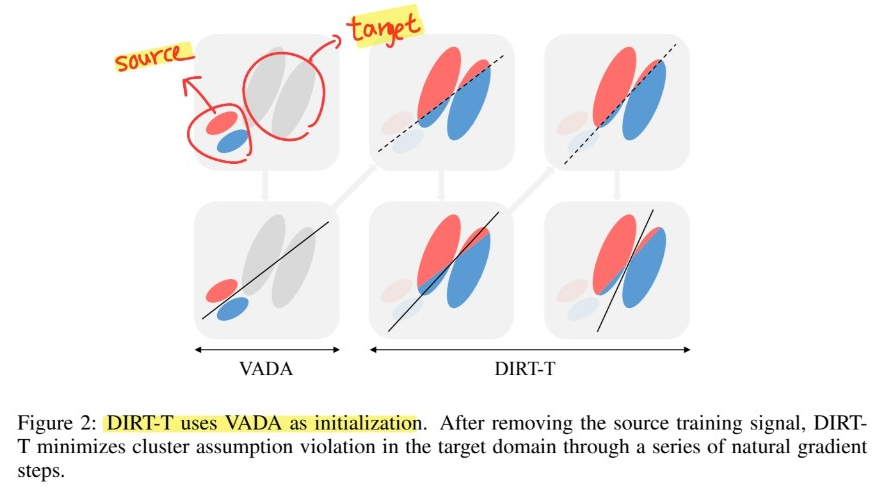
Solution
-
step 1) (Initialization)
- initialize with VADA model
-
step 2) (Refinement)
-
minimize the cluster assumption violation in target domain
-
incrementally push the classifier’s decision boundaries, away from data-dense regions,
by minimizing the target-side cluster assumption violation loss \(\mathcal{L}_t\)
-
\(\mathcal{L}_{t}(\theta)=\mathcal{L}_{v}\left(\theta ; \mathcal{D}_{t}\right)+\mathcal{L}_{c}\left(\theta ; D_{t}\right)\).
-
5. Summary
DIRT-T = recursive extension of VADA
- act of pseudo-labeling of the target distribution constructs a new SOURCE domain