[ 16. Advanced Topics in GNNs ]
( 참고 : CS224W: Machine Learning with Graphs )
Contents
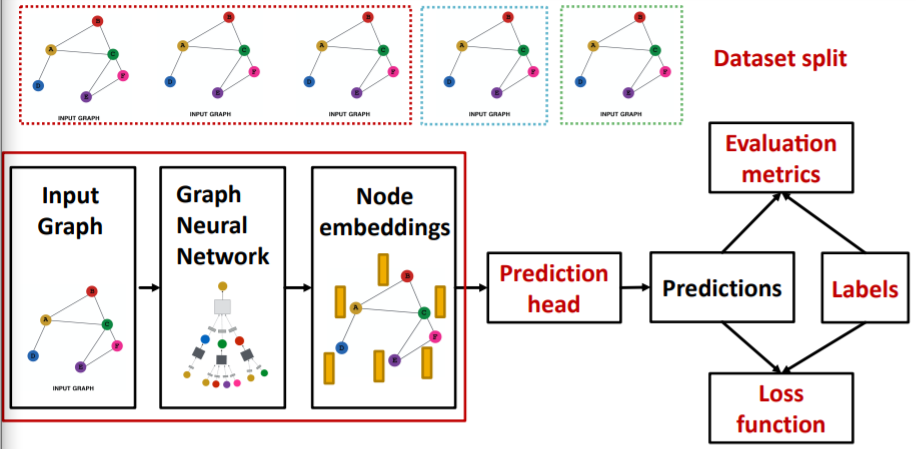
- Review (GNN Training Pipeline)
- Limitations of GNNs
0. Review (GNN Training Pipeline)
\(\rightarrow\) goal : ‘How can we make GNN representation, MORE EXPRESSIVE?’
1. Limitations of GNNs
(a) perfect GNN
Review
- \(k\)-layer GNN = embeds node, based on “K-hop” neighbors
Perfect GNN
= “injective function” between “neighborhood structure” & “embedding”
-
(issue 1) if 2 nodes have SAME neighborhood
\(\rightarrow\) must have SAME embedding
-
(issue 2) if 2 nodes have DIFFERENT neighborhood
\(\rightarrow\) must have DIFFERENT embedding
(b) Imperfect existing GNNs
Problem of (issue 1)
- SAME neighborhood, but may want DIFFERENT embeddings!
- ex) road network \(\rightarrow\) called “Position-aware task”
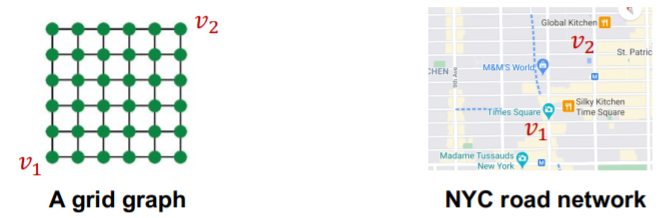
\(\rightarrow\) create node embedding, based on their “POSITIONS” in the graph
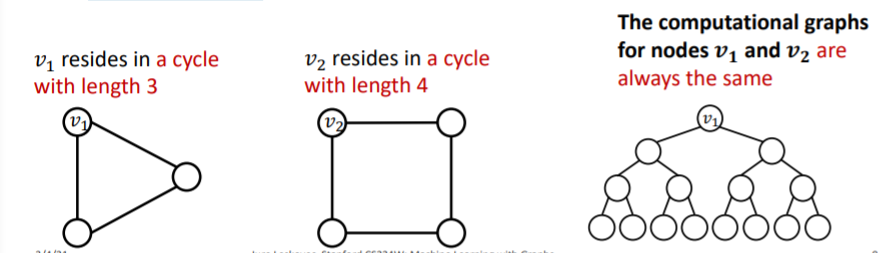
Problem of (issue 2)
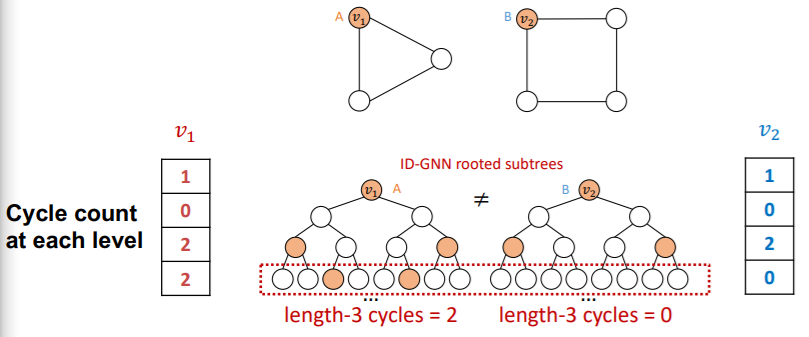
- message passing GNNs cannot count “cycle length”
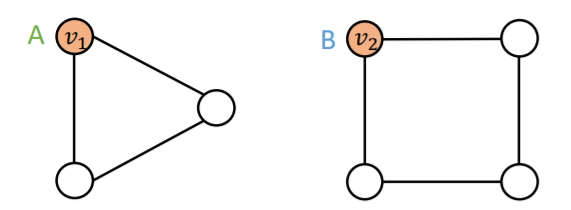
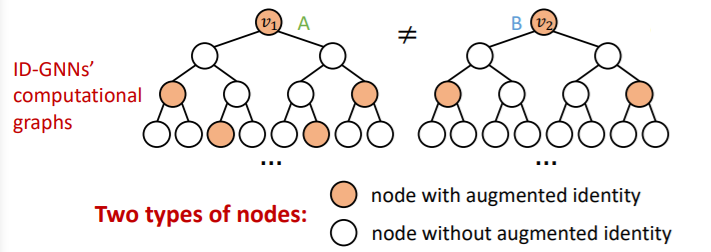
- ex) Identity-aware GNNs
\(\rightarrow\) build message passing GNNs that are more expressive than WL test
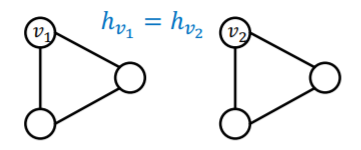
Setting
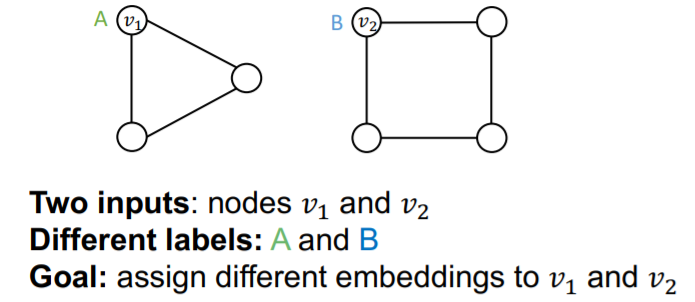
- successful model : DIFFERENT embedding for \(v_1\) & \(v_2\)
- failed model : SAME embedding for \(v_1\) & \(v_2\)
Naive solution : one-hot encoding
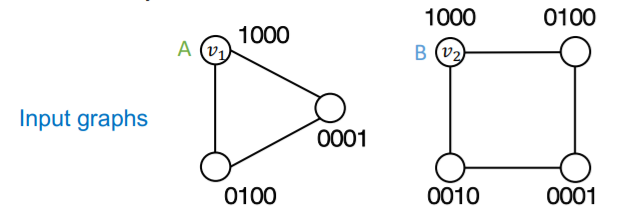
\(\rightarrow\) problem : need \(O(N)\) feature dimension & unable to generalize to new node
2. Position-aware GNN
2 types of tasks
- 1) Structure-aware task : labeled by their “structural roles”
- 2) Position-aware task : labeled by their “position”
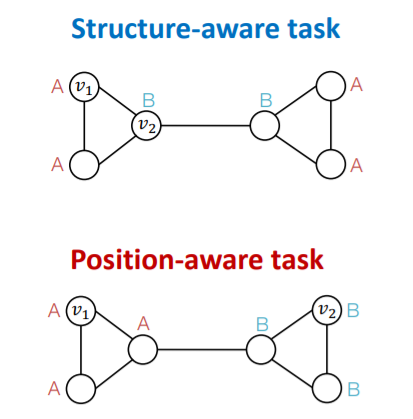
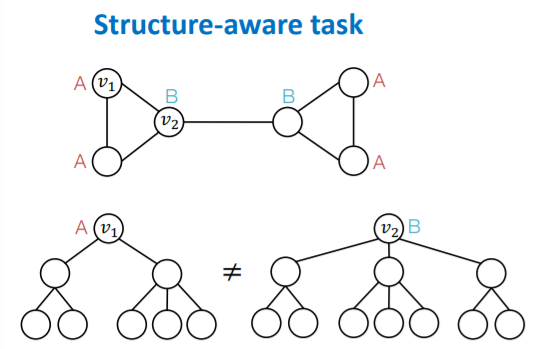
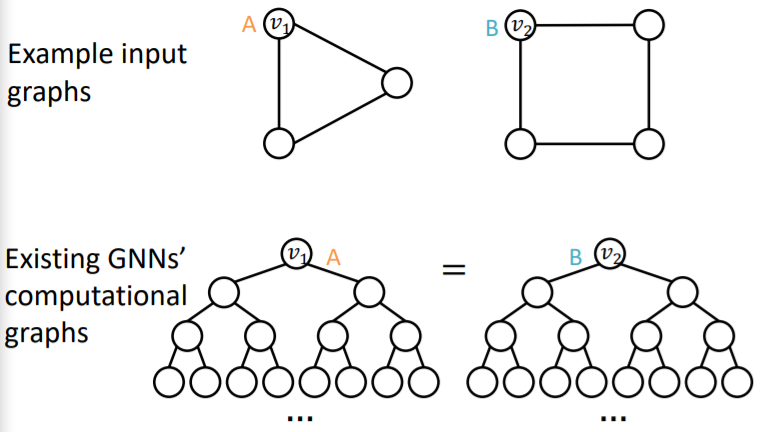
(1) Structure-aware Tasks
-
existing GNNs works well!
( = able to differentiate \(v_1\) & \(v_2\) )
-
how? by using “different computational graphs”
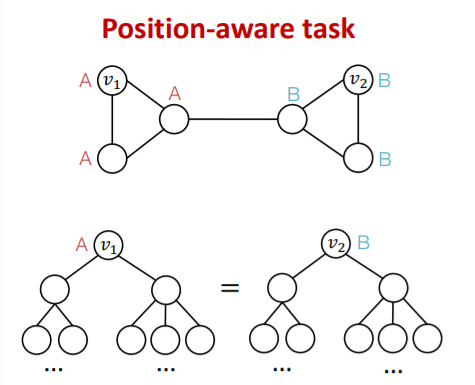
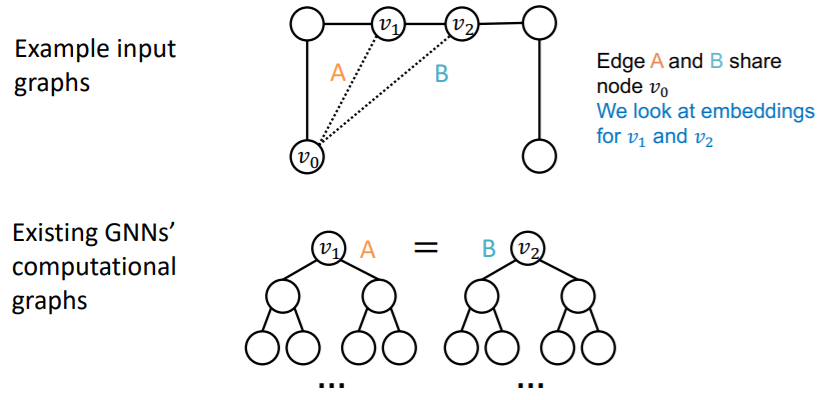
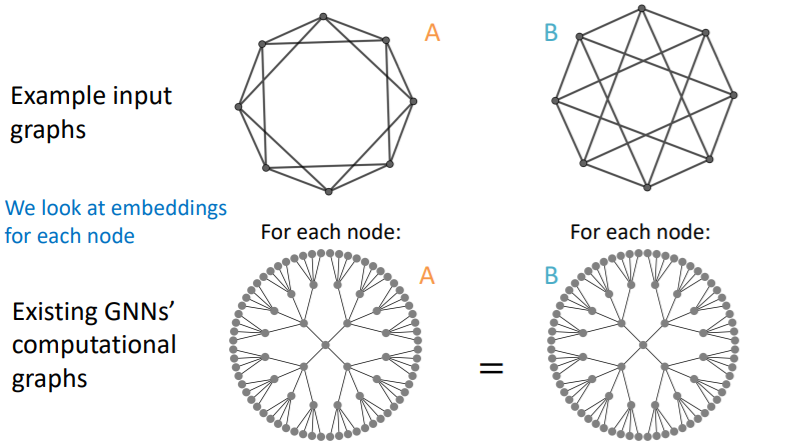
(2) Position-aware Tasks
-
existing GNNs (usually) fails!
( = unable to differentiate \(v_1\) & \(v_2\) )
-
why? due to “structure symmetry”
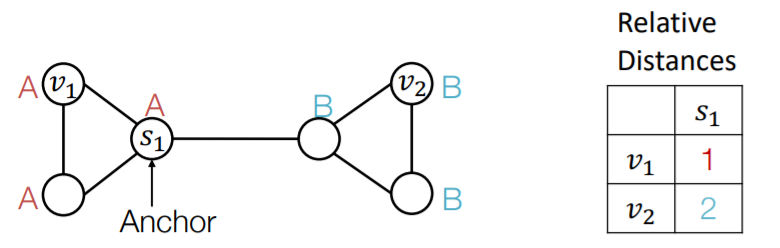
(3) Anchor
a) Anchor node
-
randomly pick node \(s_1\) as “anchor node”
-
represent \(v_1\) & \(v_2\) with “relative distances w.r.t \(s_1\)“
( = act as “coordinate axis” )
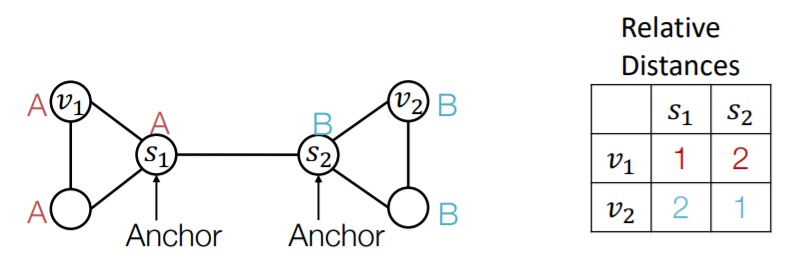
b) Multiple anchor nodes
- randomly pick node \(s_1\) & \(s_2\) as “anchor nodes”
- more anchors ( = many coordinate axes ) \(\rightarrow\) better characterization
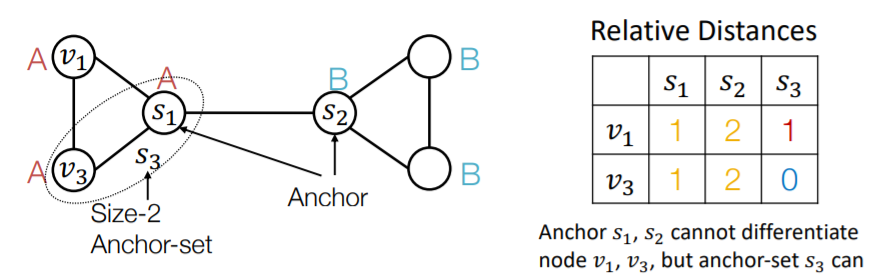
c) Anchor-sets
- ( generalization ) single node \(\rightarrow\) set of nodes
- can save the total number of anchors
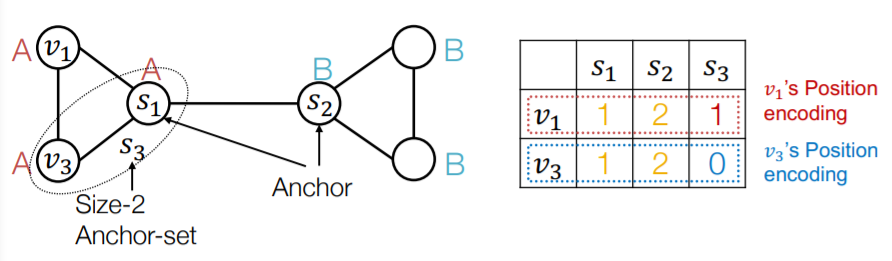
d) Summary
- can see it as “position encoding”
- represent node’s position, by using “distance from anchor-sets”
- use this as “augmented node feature”
- need NN that can maintain “permutation invariant property of PE”
3. Identity-aware GNN
GNN
- fail for position-aware task
- but, still not perfect for structure-aware tasks!
- failure
- 1) node-level
- 2) edge-level
- 3) graph-level
(1) Problems
(a) failure in Node-level Tasks
problem ) DIFFERENT input, SAME computational graph
(b) failure in Edge-level Tasks
problem ) DIFFERENT input, SAME computational graph
( of course, because “edge” depends on “two nodes” )
(c) failure in Graph-level Tasks
problem ) DIFFERENT input, SAME computational graph
if we draw 2-hop computational graphs…
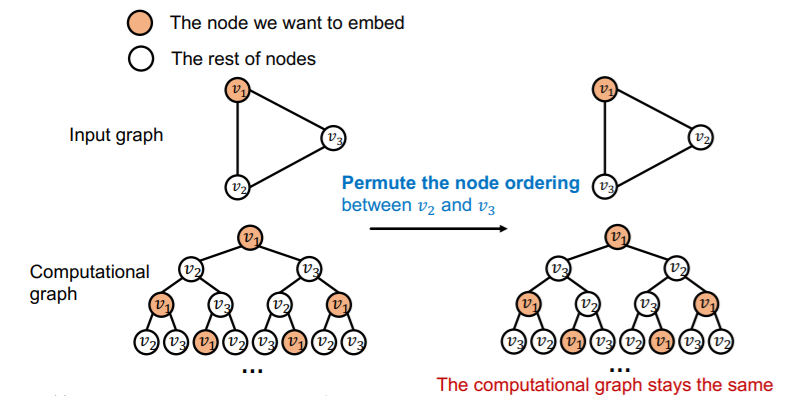
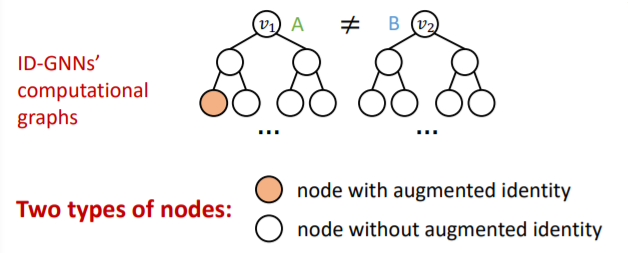
(2) Solution : Inductive Node Coloring
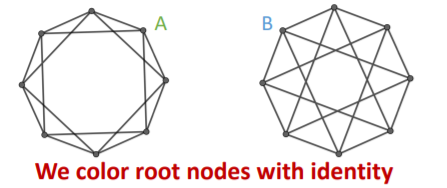
key idea : color the target node (that we want to embed)
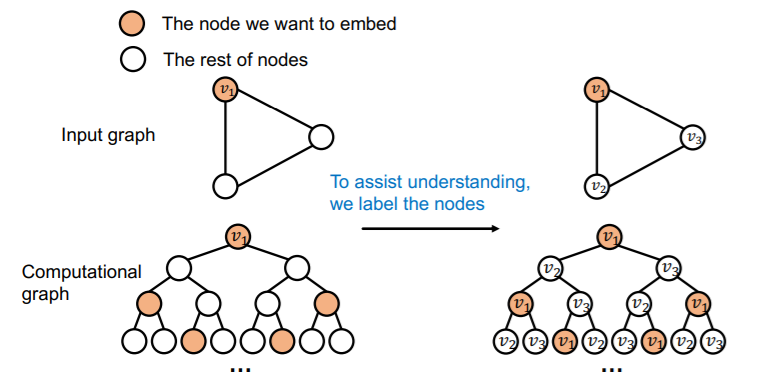
Coloring is “Inductive”
( = invariant to node order/identities )
a) node-level
ex) node classification
-
Input graphs :
-
Computational graphs : different!
b) graph-level
ex) graph classification
-
Input graphs :
-
Computational graphs : different!
c) edge-level
ex) link prediction
-
Input graphs :
-
Computational graphs : different!
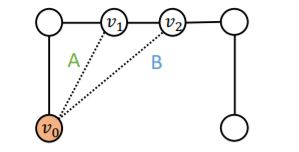
Link-prediction = “classifying a pair of nodes”
- step 1) color one of the node ( \(v_0\) )
- step 2) embed the other node ( \(v_1\) or \(v_2\) )
- step 3) use “node embedding of \(v_1\) (or \(v_2\))”, conditioned on \(v_0\)
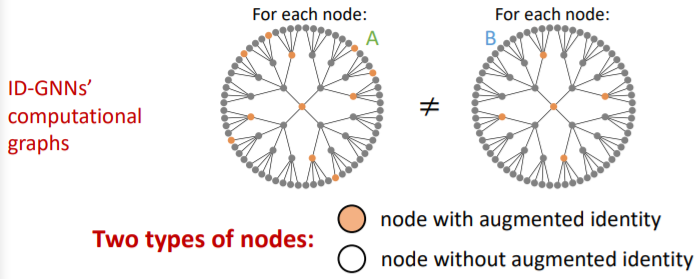
(3) Identity-aware GNN ( ID-GNN )
key point : use inductive node coloring
\(\rightarrow\) heterogenous message passing
( = different message passing to different nodes )
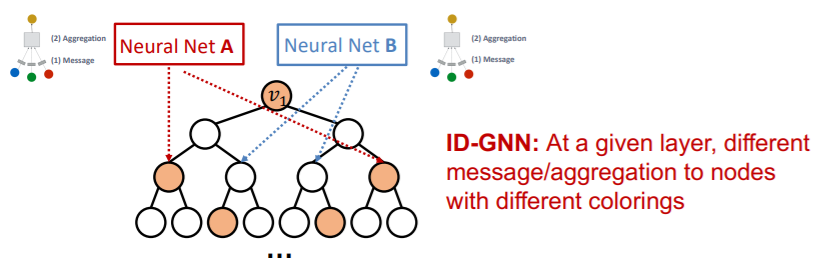
Thus, it will have “different embedding” !
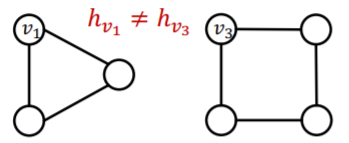
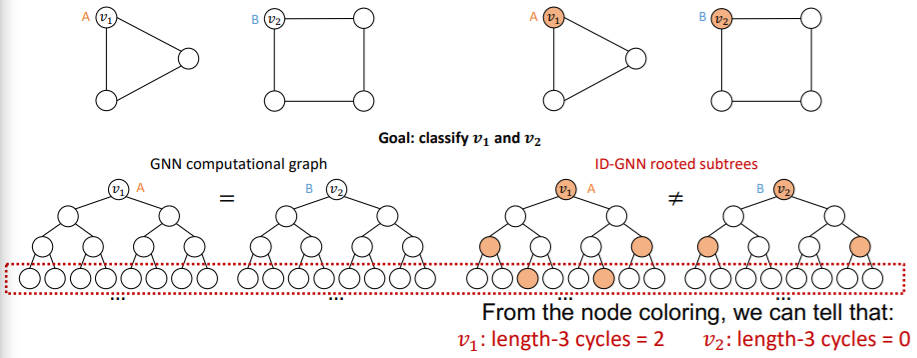
GNN vs ID-GNN
Comparison
- GNN : can NOT count cycles, originating from a given node
- ID- GNN : can count cycles, originating from a given node
( Left : GNN & Right : ID-GNN )
(4) ID-GNN-Fast
ID-GNN-Fast = Simple version of ID-GNN
Comparison
-
ID-GNN : heterogenous MP (O)
-
ID-GNN-Fast : heterogenous MP (X)
-
rather, use identity information as augmented node feature
( e.g. use “cycle counts”)
-
(5) Summary of ID-GNN
General & Powerful extension to GNN framework
- applicable to “any message passing GNNs”
- more expressive than original GNN ( 1-WL test )
- can easily implement (
PyG,DGL)
4. Robustness of GNN
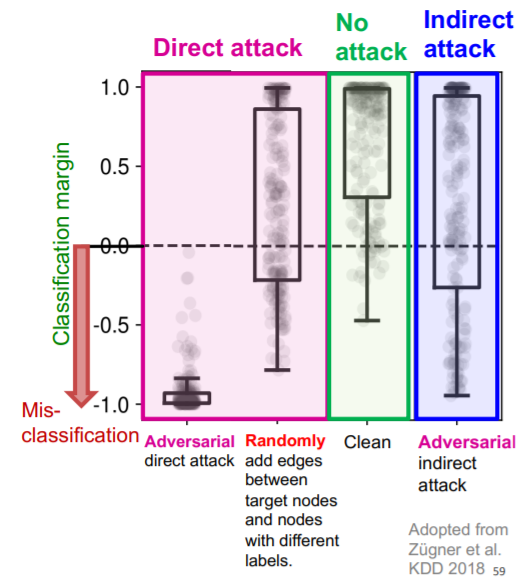
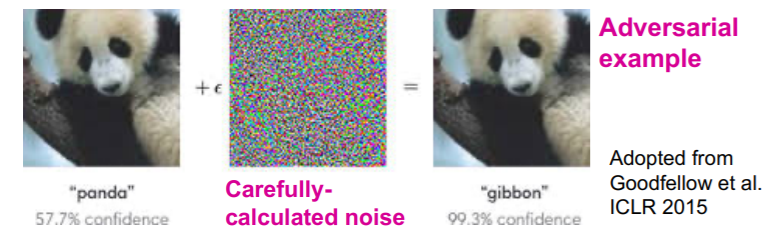
(1) Adversarial attacks
small perturbation on data, huge difference in output!
Problem )
- prevents the reliable deployment of DL models to real world
example )
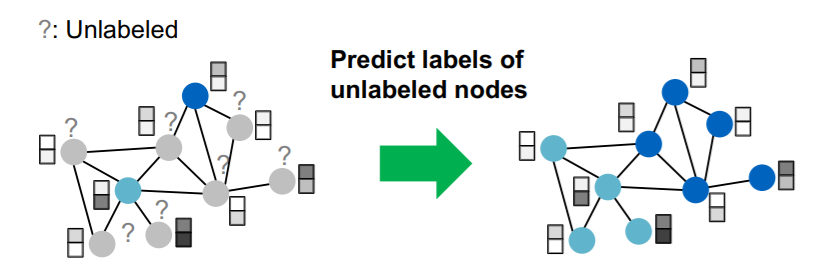
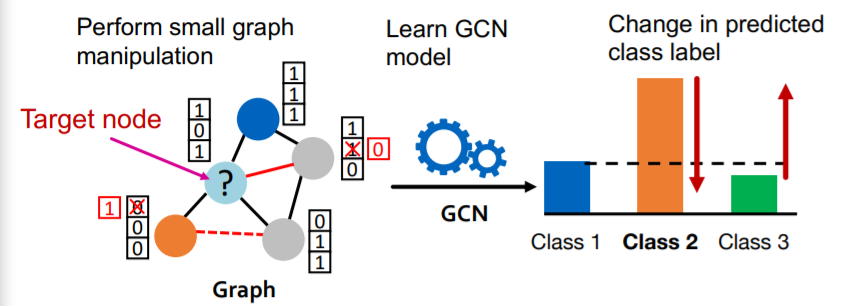
(2) Settings
-
Task : semi-supervised node classification
-
Model : GCN
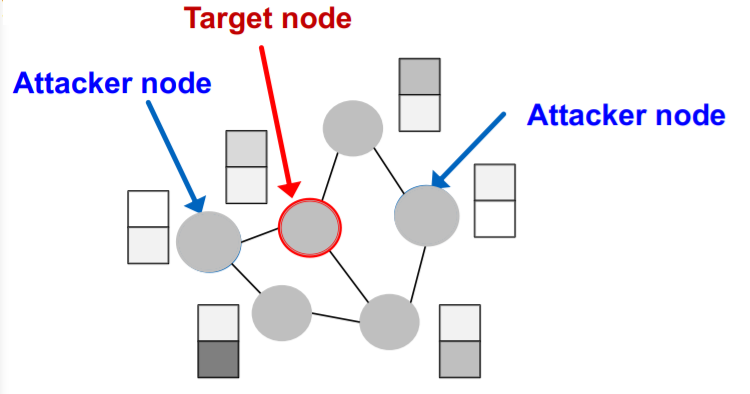
Concepts
-
Target node \(t \in V\)
-
node to be attacked
( = want to change “label prediction” )
-
-
Attacker nodes \(S \in V\)
- nodes, that attacker can modify
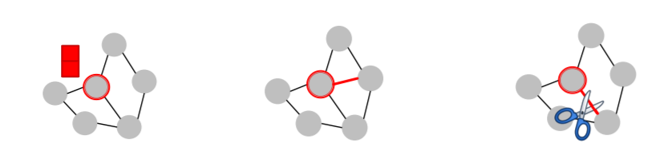
(3) Attack possibilities
a) Direct attack
- attacker node = target node ( \(S = \{t\}\) )
- 3 types
- 1) modify target “node feature”
- 2) “add connection” to target
- 3) “remove connection” from target
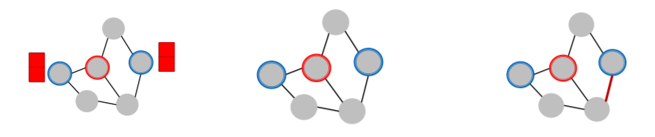
b) Indirect attack
-
attacker node \(\neq\) target node ( \(t \notin S\) )
-
3 types
- 1) modify attacker “node feature”
- 2) “add connection” to attacker
- 3) “remove connection” from attacker
(4) Goal of attacker
MAXIMIZE “change of target node label prediction”
- SUBJECT TO “small graph manipulation”
(5) Mathematical Formulation
Notation
-
Original graph
- \(\boldsymbol{A}\) : adjacency matrix
- \(\boldsymbol{X}\) : feature matrix
-
Manipulated graph ( with noise )
- \(\boldsymbol{A}'\) : adjacency matrix
- \(\boldsymbol{X}'\) : feature matrix
-
Assumption : \(\left(\boldsymbol{A}^{\prime}, \boldsymbol{X}^{\prime}\right) \approx(\boldsymbol{A}, \boldsymbol{X})\)
-
meaning = “small” graph manipulation
( preserve basic graph/feature statistics )
-
-
Target node : \(v \in V\)
Graph manipulation : can be both
- 1) direct
- 2) indirect
ORIGINAL graph
-
parameter of GCN ( with ‘original graph’ )
- \(\boldsymbol{\theta}^{*}=\operatorname{argmin}_{\boldsymbol{\theta}} \mathcal{L}_{\text {train }}(\boldsymbol{\theta} ; \boldsymbol{A}, \boldsymbol{X})\).
-
prediction of GCN ( on ‘target node’ )
- \(c_{v}^{*}=\operatorname{argmax}_{c} f_{\theta^{*}}(A, X)_{v, c}\).
( = predicted class of node \(v\) )
MANIPULATED graph
-
parameter of GCN ( with ‘manipulated graph’ )
- \(\boldsymbol{\theta}^{* \prime}=\operatorname{argmin}_{\boldsymbol{\theta}} \mathcal{L}_{\text {train }}\left(\boldsymbol{\theta} ; \boldsymbol{A}^{\prime}, \boldsymbol{X}^{\prime}\right)\).
-
prediction of GCN ( on ‘target node’ )
- \(c_{v}^{* \prime}=\operatorname{argmax}_{c} f_{\theta^{* \prime}}\left(A^{\prime}, X^{\prime}\right)_{v, c}\).
( = predicted class of node \(v\) )
Goal : \(c_{v}^{* \prime} \neq c_{v}^{*}\)
- change the prediction after manipulation!
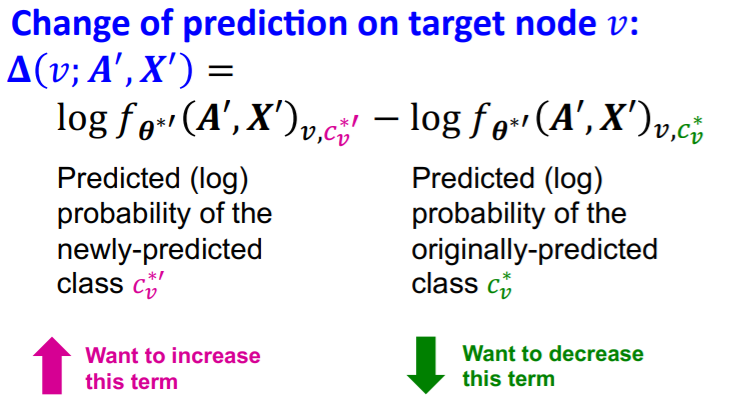
Optimization
-
\(\operatorname{argmax}_{A^{\prime}, X^{\prime}} \Delta\left(v ; \boldsymbol{A}^{\prime}, \boldsymbol{X}^{\prime}\right)\),
subject to \((\boldsymbol{A}^{\prime}, \boldsymbol{X}^{\prime}) \approx (\boldsymbol{A}, \boldsymbol{X})\)
-
problem :
-
1) \(\boldsymbol{A}^{'}\) is discrete
-
2) for every modified \(\boldsymbol{A}^{'}\) & \(\boldsymbol{X}^{'}\),
need to be “re-trained” ( computationally expensive )
-
(6) Experiments
Power of attack
- (1) Direct > (2) Indirect > (3) Random attack