
METRO : A Generic GNN Framework for MTS Forecasting (2020, 131)
Contents
- Abstract
- Introduction
- Preliminaries
- METRO
- Temporal Graph Embedding Unit
- Single-scale Graph Update Unit
- Cross-scale Graph Fusion Kernel
- Predictor and Training Strategy
0. Abstract
METRO
-
generic framework with “Multi-scale Temporal Graphs NN”
-
models the “dynamic & cross-scale variable correlations” simultaneously
-
represent MTS as “series of temporal graphs”
can capture both
- inter-step correlation
- intra-step correlation
via message-passing & node embedding
1. Introduction
GNN for MTS forecasting
-
capture the interdependencies & dynamic trends over a group of variables
- nodes = variables
- edges = interactions of variables
-
can use “even for data w.o explicit graph structures”
- use hidden graph structures
-
previous works
-
assume that “MTS are static”
\(\rightarrow\) however, “interdependencies between variables can be temporally dynamic”
- ex) MTGNN, TEGNN, ASTGCN
-
Previous GNN works
-
MTGNN & TEGNN
- learn/compute adjacency matrices of graphs, from the whole input TS
- hold them for “subsequent temporal modeling”
-
ASTGCN
-
for ‘traffic prediction’
( connections between nodes are known in advance )
-
considers “adaptive adjacency matrix” ( attention value )
-
but on relatively large scale, that only cahnges with regard to input series example
-
-
STDN
- flow gating mechanism, to learn “dynamic similarity” by time step
- but, can only be applied on consecutive & grid partitioned regional maps
Multi-scale patterns
-
[ approach 1 ]
- treat time stamps of MTS as “side information”
- combine the “embedded time stamps” with MTS’s embedding
-
[ approach 2 ]
- first, adopt filters ( with different kernel sizes ) to MTS
- second, sum/concatenate the multi-scale features
-
common
-
can incorporate information “across different scales”
-
but, just simple linear-weight transformation
( relation between pairs of scales are ignored )
-
Problems
- 1) dependencies between variables are dynamic
- 2) temporal patterns in MTS occur in multiple scale
\(\rightarrow\) propose METRO ( Multi-scalE Temporal gRaph neurla netwOrks )
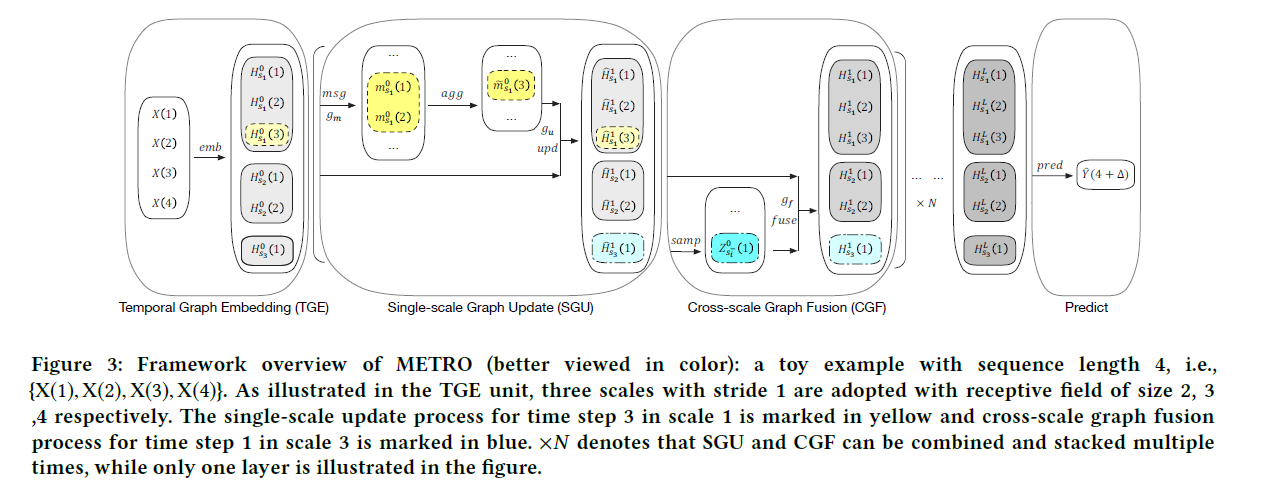
4 components of METRO
- 1) TGE (Temporal Graph Embedding)
- obtains “node embeddings” under multi-scale
- 2) SGU (Single-scale Graph Update)
- dynamically leverages graph structures of nodes in each single scale
- propagates info from a node’s intra/inter-step neighbors
- 3) CGF (Cross-scale Graph Fusion) kernel
- walks along the time axis & fuses features across scales
- 4) predictor
- decoder ( decodes node embeddings )
- gives final predictions
2. Preliminaries
MTS forecasting
Notation
- MTS : \(X=\{X(1), X(2), \ldots, X(t)\}\)
- at time \(i\) : \(X(i)=\left[x_{i, 1}, . ., x_{i, n}\right] \in \mathbb{R}^{n \times m}, i \in[1, \ldots, t]\).
- \(x_{i, k} \in \mathbb{R}^{m}, k \in[1, \ldots, n]\).
- \(n\) : number of variables ( TS )
- \(m\) : number of dimension
- at time \(i\) : \(X(i)=\left[x_{i, 1}, . ., x_{i, n}\right] \in \mathbb{R}^{n \times m}, i \in[1, \ldots, t]\).
- Goal : predict \(\Delta\) steps ahead
- output : \(\hat{Y}(t+\Delta)=X(t+\Delta)=\left[x_{t+\Delta, 1}, . ., x_{t+\Delta, n}\right]\)
- input : \(\{X(t-w+1), \ldots, X(t)\}\)
Graphs
(1) Graph : \(G=(V, E)\)
- static graph
- vertices & edges are invariant over time
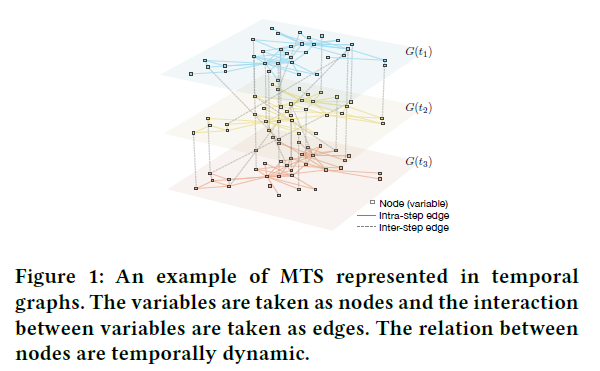
(2) Temporal Graph : \(G(t)=(V(t), E(t))\)
- graph as a function of time
- 2 types of temporal graphs
- 1) INTRA-step TG : \(V(t)\) is made up of variables within time step \(t\)
- 2) INTER-step TG : \(V(t)\) consists variables of time step \(t\) and its previous time step \(t-1\)
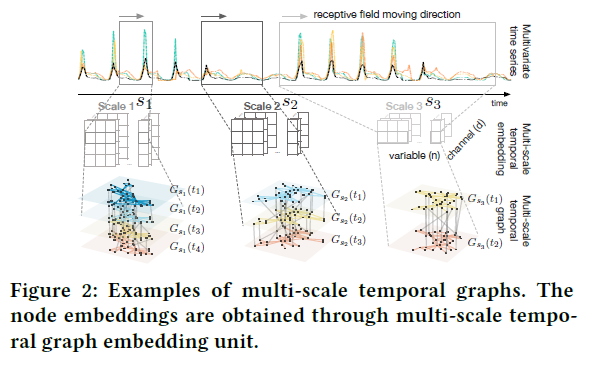
(3) Multi-scale Temporal Graph : \(G_{S}(t)=\left(V_{S}(t), E_{S}(t)\right)\)
- each node in the graph represents an observation of “time-length \(w_s\)”
3. METRO
(1) TGE (Temporal Graph Embedding Unit)
TGE = “encoder”
-
obtain “embeddings of TEMPORAL features of each variables”
-
example)
-
input : \(\left\{X\left(t_{0}\right), \ldots\right.\left.X\left(t_{0}+w-1\right)\right\}\)
-
output :
-
temporal feature at time step \(\mathrm{t}, t \in\left[t_{0}, \ldots, t_{0}+\right.\) \(w-1]\),
under scale \(i\) is..
-
\(\mathrm{H}_{s_{i}}^{0}(t)=\operatorname{emb}\left(s_{i}, t\right)=f\left(X(t), \ldots, X\left(t+w_{s_{i}}-1\right)\right)\).
-
-
notation
-
\(n\) : # of variables
-
\(d\) : embedding dimension
-
\(f\) : embedding function
-
ex) unpadded convolution with multiple filters with size \(1 \times w_{s_i}\)
( output of multiple convolution channels are “concatenated” )
-
-
-
(2) SGU (Single-scale Graph Update Unit)
modeling “hidden relations among variables”
- by training/updating “adjacency matrices”
- problem : message aggregation over time, with FIXED structures?
Solution : introduce SGU
-
adaptively learn “INTRA & INTER” step adjacency matrix of variables
-
propose “graph-based temporal message passing”
- use “historical temporal information” of nodes
-
ex) SGU operates \(s_1\), \(s_2\), \(s_3\) separately
-
example : \(G_{s_1}(:)\) … jointly considers
- 1) message passing WITHIN a time step
- \(G_{s_1}(t_i)\) & time stamps
- 2) message passing BETWEEN a time step
- \(G_{s_1}(t_i)\) & \(G_{s_1}(t_2)\)
- 1) message passing WITHIN a time step
Process
-
1) learn messages
-
messages between nodes of 2 adjacent time steps :
-
\(\mathbf{m}^{l}(t-j)=m s g\left(\mathbf{H}^{l}(t-j-1), \mathbf{H}^{l}(t-j), A_{t-j-1, t-j}^{l}\right)\).
where \(A_{t-j-1, t-j}^{l}=g_{m}\left(\mathbf{H}^{l}(t-j-1), \mathbf{H}^{l}(t-j)\right)\).
-
-
ex) \(msg\) : GCN
-
ex) \(g_m\) : transfer entropy / node-embedding-based deep layer model
-
-
2) aggregate messages
- \(\widetilde{\mathbf{m}}^{l}(t)=\operatorname{agg}\left(\mathbf{m}^{l}(t-k-1), \ldots, \mathbf{m}^{l}(t-1)\right)\).
- ex) simple concatenation / RNN / Transformer …
Update
-
embedding of nodes ( in step \(t\) ) are updated, based on..
- 1) aggregated message
- 2) memory of previous layer
-
\(\hat{\mathrm{H}}^{l+1}(t) =u p d\left(\widetilde{\mathrm{m}}^{l}(t), \mathbf{H}^{l}(t), A_{t}^{l}\right)\).
where \(A_{t}^{l} =g_{u}\left(\widetilde{\mathrm{m}}^{l}(t), \mathbf{H}^{l}(t)\right)\)
- ex) \(upd\) : memory update function ( GRUs, LSTMs )
- ex) \(g_u\) : graph-based GRU
(3) CGF (Cross-scale Graph Fusion) Kernel
CGF
- diffuse information “ACROSS SCALES”
- “scales” = ‘size of respective fields’
- need to decide “which time steps in which scales” can interact
Standard = “HIGHER scale”
Sampling fine features (time steps) = “LOWER scales”
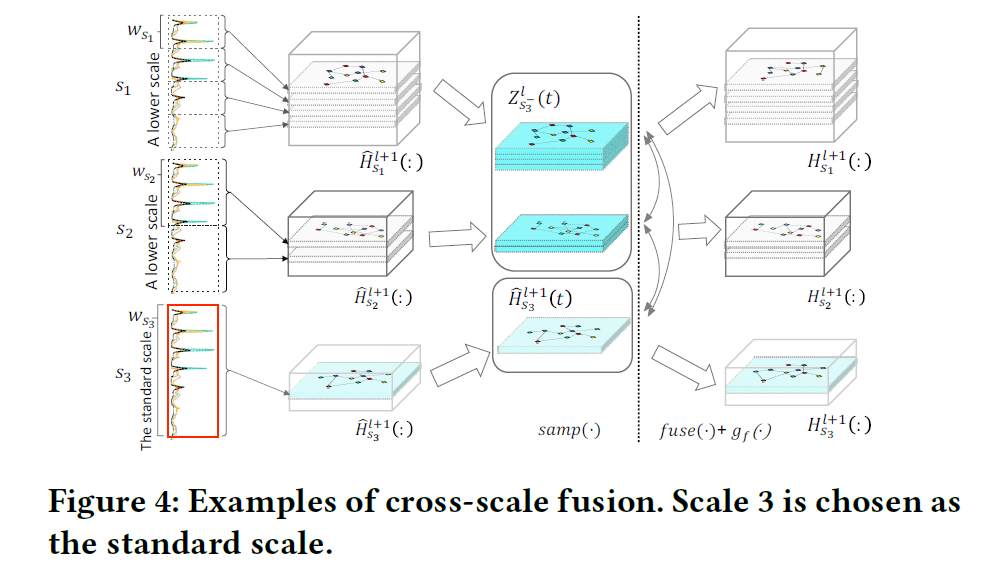
- \(\mathrm{Z}_{s_{i}^{-}}^{l}(t)=\operatorname{samp}\left(\hat{\mathbf{H}}_{s_{1}}^{l+1}(:), \ldots, \hat{\mathbf{H}}_{s_{i-1}}^{l+1}(:)\right)\).
- \(\hat{\mathbf{H}}_{s_{j}}^{l+1}(:)\) : output updated features of SGU unit
- \(\mathrm{Z}_{s_{i}^{-}}^{l}\) : selected lower scale features, concatenated in time axis
Information diffusion, between
- 1) \(\mathrm{Z}_{s_{i}^{-}}^{l}(t)\)
- 2) \(\hat{\mathbf{H}}_{s_{i}}^{l+1}(t)\)
using a graph learning function \(g_f\)
\(\begin{aligned} \mathrm{H}_{s_{1}: s_{i-1}}^{l+1}(:), \mathrm{H}_{s_{i}}^{l+1}(t) & \leftarrow f u s e\left(\mathrm{Z}_{s^{-}}^{l}(t), \hat{\mathrm{H}}_{s_{i}}^{l+1}(t), A_{\left(s_{i}^{-}, s_{i}\right), t}^{l}\right), \\ A_{\left(s_{i}^{-}, s_{i}\right), t}^{l} &=g_{f}\left(\mathrm{Z}_{s_{i}^{-}}^{l}(t), \hat{\mathrm{H}}_{s_{i}}^{l+1}(t)\right), \end{aligned}\).
- \(\mathrm{H}_{s_{1}: s_{i-1}}^{l+1}(:)\) : cross-scale fused embedding of sampled lower scale features
- \(\mathbf{H}_{s_{i}}^{l+1}(t)\) : standard high scale at time step \(t\)
- ex) \(fuse\) : GCNs
(4) Predictor and Training Strategy
\(\hat{Y}(t+\Delta)=\operatorname{pre}\left(\mathbf{H}_{s_{1}: s_{p}}(:)\right)\).