
Self-Supervised Generalization with Meta Auxiliary Learning
Contents
- Abstract
- Introduction
- Related Work
- Multi-task & Transfer Learning
- Auxiliary Learning
- Meta Learning
- Meta Auxiliary Learning
- Problem Setup
- Model Objectives
- Mask SoftMax for Hierarchical Predictions
- The Collapsing Class Problem
0. Abstract
learning with auxiliary task \(\rightarrow\) Improve generalization ability of primary task
- but … cost of manually labeling auxiliary data
MAXL ( Meta AuXiliary Learning )
- automatically learns appropriate labels for auxiliary task
- train 2 NNs
- (1) label-generarion network : to predict auxiliary labels
- (2) multi-task network : to trian the primary task with auxiliary task
1. Introduction
Auxiliary Learning (AL) vs. Multi-task Learning (ML)
- AL : focus only on primary task
- MTL : focus on both primary task & auxiliary task
MAXL
-
simple & general meta-learning algorithm
-
defining a task = defining a label
( = optimal auxiliary task = one which has optimal labels )
\(\rightarrow\) goal : automatically discover these auxiliary labels, using labels for primary task
2 NNs
- Multi-task network
- Trains primary task & auxiliary task
- Label-generation network
- learns the labels for auxiliary task
Key idea of MAXL
- use the performance of the primary task, to improve the auxiliary labels for the next iteration
- achieved by defining a loss for the label-generation network as a function of multi-task network’s performance on primary task training data
2. Related Work
(1) Multi-task & Transfer Learning
-
MTL : shared representation & set of related learning tasks
-
TL : to improve generatliaztion / incorporate knowledge from other domains
(2) Auxiliary Learning
Goal : focus only on single primary task
Can also perform auxiliary learning without GT labels ( = in unsupervised manner )
(3) Meta Learning
aims to induce the learning algorithm itself
MAXL : designd to learn to generate useful auxiliary labels, which themselves are used in another learning procedure
3. Meta Auxilary Learning
task : classification task ( both for primary & auxiliary task )
- auxiliary task : sub-class labelling problem
- ex) primary - auxiliary : Dog - Labrador
(1) Problem Setup
Notation
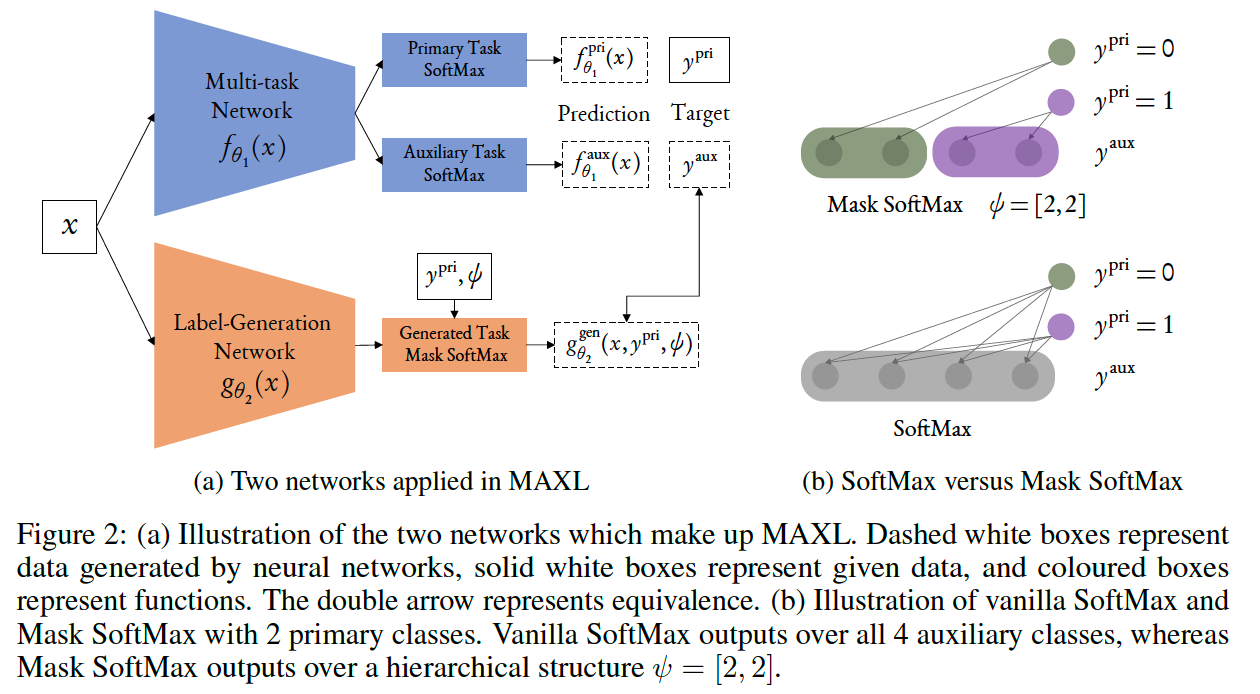
- \(f_{\theta_1}(x)\) : multi-task network
- updated by loss of primary & auxiliary tasks
- \(g_{\theta_2}(x)\) : label-generation network
- updated by loss of primary task
Multi-task Network
-
apply hard parameter sharing approach
( common & task-specific parameters )
-
notation
-
primary task prediction : \(f_{\theta_1}^{\text {pri }}(x)\)
( ground truth : \(y^{\text {pri }}\) )
-
auxiliary task prediction : \(f_{\theta_1}^{\text {aux }}(x)\)
( ground truth : \(y^{\text {aux }}\) )
-
Assign each primary class its own unique set of possibile auxiliary classes
( rather than sharing all auxiliary classes across all primary classes )
\(\rightarrow\) use hierarchical structure !!
Label-generation Network
-
hierarchical structure \(\psi\)
( = determines the number of auxiliary classes for each primary class )
-
output layer : masked SoftMax
( to ensure that each output node represents an auxiliary class, correspodning to only one primary class )
- Notation
- input data : \(x\)
- GT primary task label : \(y^{\text{pri}}\)
- Auxiliary label : \(y^{\mathrm{aux}}=g_{\theta_2}^{\mathrm{gen}}\left(x, y^{\mathrm{pri}}, \psi\right)\)
- Allow soft assignment for generated auxiliary labels
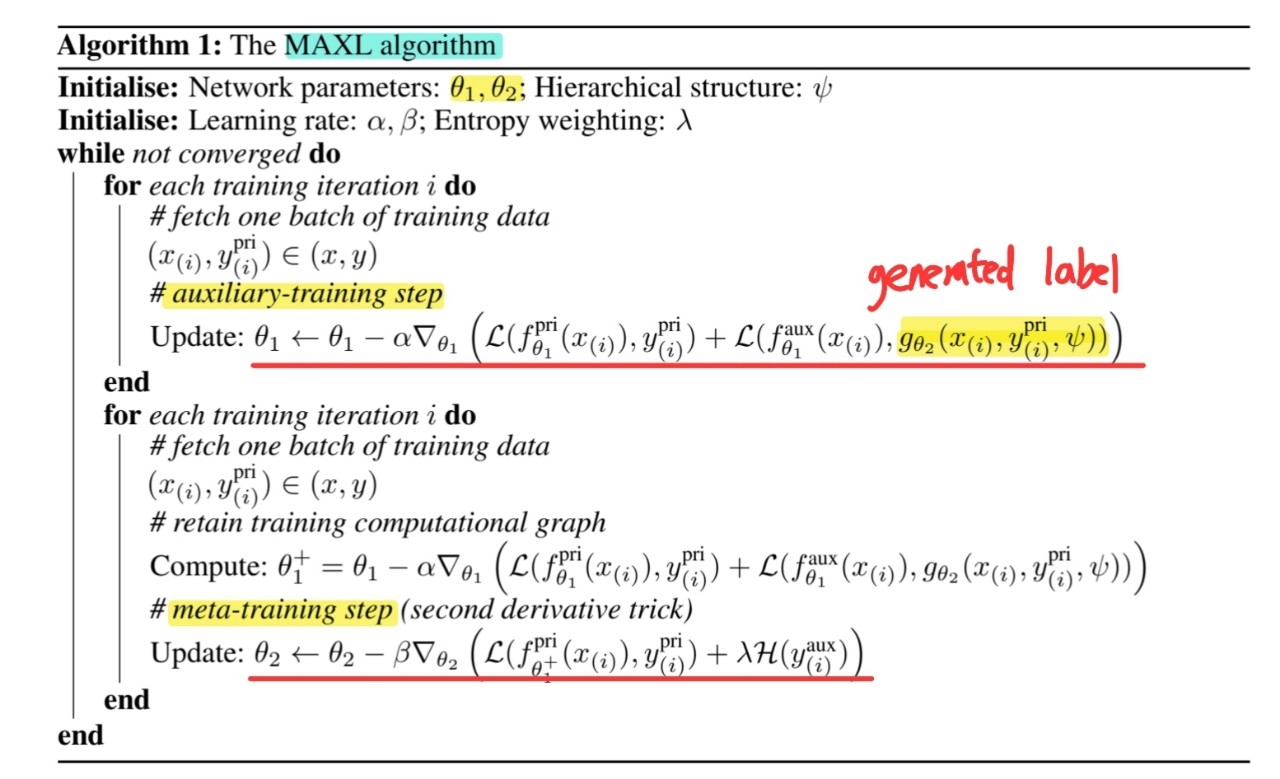
(2) Model Objectives
2 stages per peoch
- stage 1) Train multi-task network
- using primary task label & auxiliary labels
- stage 2) Train label-generation network
\(\rightarrow\) train both networks, in an iterative manner, until convergence
for both primary & auxiliary tasks, apply focal loss
- focusing parameter \(\gamma=2\)
- \(\mathcal{L}(\hat{y}, y)=-y(1-\hat{y})^\gamma \log (\hat{y})\),
[ Stage 1 ] Update parameters \(\theta_1\) for multi-task network
- \(\underset{\theta_1}{\arg \min }\left(\mathcal{L}\left(f_{\theta_1}^{\text {pri }}\left(x_{(i)}\right), y_{(i)}^{\text {pri }}\right)+\mathcal{L}\left(f_{\theta_1}^{\text {aux }}\left(x_{(i)}\right), y_{(i)}^{\text {aux }}\right)\right)\).
- where \(y_{(i)}^{\text {aux }}=g_{\theta_2}^{\text {gen }}\left(x_{(i)}, y_{(i)}^{\text {pri }}, \psi\right)\)
[ Stage 2 ] Update parameters \(\theta_2\) for label-generation network
-
leveraging the performance of the multi-task network to train the label-generation network can be considered as a form of meta learning
-
\(\underset{\theta_2}{\arg \min } \mathcal{L}\left(f_{\theta_1^{+}}^{\text {pri }}\left(x_{(i)}\right), y_{(i)}^{\text {pri }}\right)\).
-
\(\theta_1^{+}\) : weights of the multi-task network after one gradient updates
( \(\theta_1^{+}=\theta_1-\alpha \nabla_{\theta_1}\left(\mathcal{L}\left(f_{\theta_1}^{\mathrm{pri}}\left(x_{(i)}\right), y_{(i)}^{\mathrm{pri}}\right)+\mathcal{L}\left(f_{\theta_1}^{\mathrm{aux}}\left(x_{(i)}\right), y_{(i)}^{\mathrm{aux}}\right)\right)\) )
-
problem : generated auxiliary labels can easily collapse
( = always generate the same auxiliary label )
\(\rightarrow\) solution : encourage the NN to learn more complex & informative auxiliary tasks, by applying entropy loss
- \(\theta_2 \leftarrow \theta_2-\beta \nabla_{\theta_2}\left(\mathcal{L}\left(f_{\theta_1^{+}}^{\text {pri }}\left(x_{(i)}\right), y_{(i)}^{\text {pri }}\right)+\lambda \mathcal{H}\left(y_{(i)}^{\text {aux }}\right)\right)\).
(3) Mask SoftMax for Hierarchical Predictions
-
include a hierarchy \(\psi\)
-
to implement this, design Mask Softmax
( to predict auxiliary labels only for certain auxiliary classes )
-
\(M=\mathcal{B}(y, \psi)\).
-
ex) primary task with 2 classes \(y=0,1\), and a hierarchy of \(\psi=[2,2]\)
- binary masks :
- \(M=[1,1,0,0]\) for \(y=0\)
- \(M = [0,0,1,1]\) for \(y=1\)
- binary masks :
Softmax vs Mask Softmax :
- Softmax : \(p\left(\hat{y}_i\right)=\frac{\exp \hat{y}_i}{\sum_i \exp \hat{y}_i}, \quad\)
- Mask Softmax : \(p\left(\hat{y}_i\right)=\frac{\exp M \odot \hat{y}_i}{\sum_i \exp M \odot \hat{y}_i}\)
(4) The Collapsing Class Problem
- introduce an additional regularization loss
- Entropy loss : calculates the KL divergence between…
- (1) predicted auixliary label space \(\hat{y_{(i)}}\)
- (2) uniform distribution \(\mathcal{U}\) for each \(i^{\text{th}}\) batch
- \(\mathcal{H}\left(\hat{y}_{(i)}\right)=\sum_{k=1}^K \hat{y}_{(i)}^k \log \hat{y}_{(i)}^k, \quad \hat{y}_{(i)}^k=\frac{1}{N} \sum_{n=1}^N \hat{y}_{(i)}^k[n]\).
- \(k\) : total number of auxiliary classes
- \(N\) : training batch size