
( 참고 : Fastcampus 강의 )
[ 20. Off-policy MC Control ]
Contents
- Review
- Off policy의 장점
- Off policy 학습
- 목적
- Example
- Importance Sampling
- 구체적 알고리즘
1. Review
-
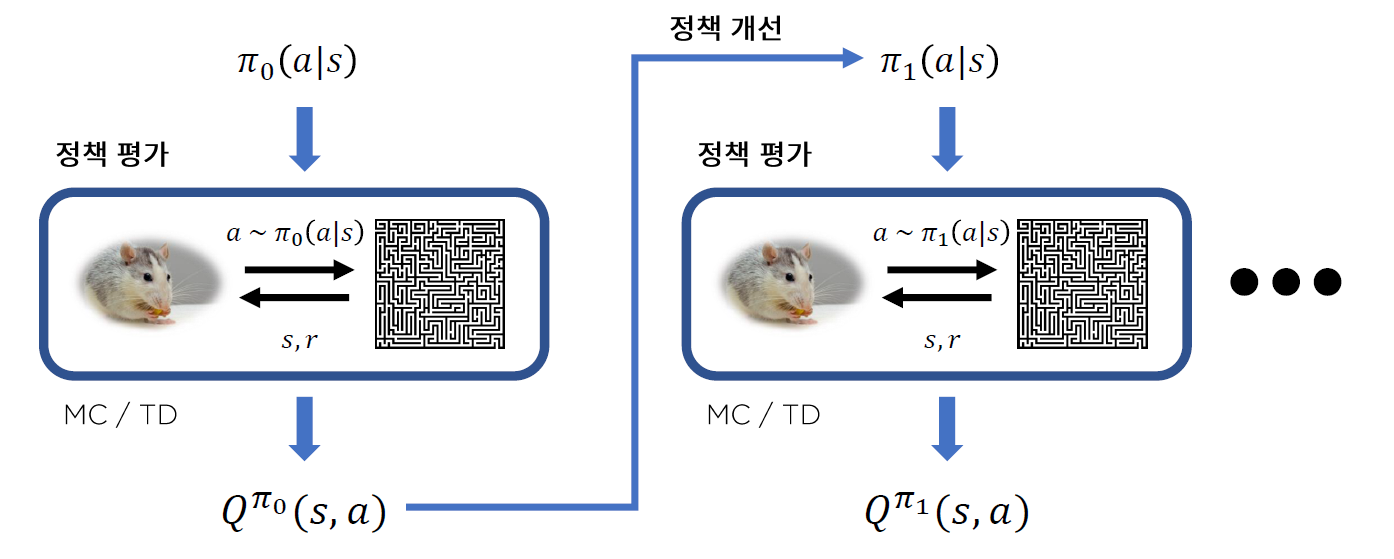
0) 임의의 Policy \(\pi_0\) 에서 시작
-
1) Agent와 Environment사이의 상호작용 ( action & state/reward 받기 )
-
2) Q값 추산
-
3) 정책 개선 (epsilon-greedy)하여 \(\pi_1\)로 update
-
1) Agent와 Environment사이의 상호작용 ( action & state/reward 받기 )
-
2) Q값 추산
….
문제점 : 매 정책 개선마다, \(Q^{\pi_k}\)를 계산하기 위해 새로운 샘플이 필요하다! INEFFICIENT
Off Policy?
사람은, 자신이 한 행동이 아니라도, 자신의 행동을 더 개선시킬 수 있다.
RL의 agent또한 그럴 수 있다. 이러한 학습 scheme을 Off-policy라고 한다!
Goal
- 목표 : 주어진 정책 \(\pi(a \mid s)\)에 대한 \(Q^{\pi}(s,a)\)를 계산하는 것
- \(\pi(a \mid s)\) : TARGET policy
- 의문점 : 임의로 정한 행동 정책 \(\mu(a \mid s)\)으로 구한 episode에서도, \(Q^{\pi}(s,a)\)를 계산할 수 있을까?
- \(\mu(a \mid s)\) : BEHAVIOR policy
- 정답 : YES! OFF Policy
2. Off policy의 장점
3. Off policy 학습
(1) 목적
\(Q^{\pi}(s,a)\) 를 잘 추산하기
\(\rightarrow \quad \because\) 좋은 policy를 찾을 수 있으므로
\(\begin{aligned} Q^{\pi}(s, a) & \stackrel{\text { def }}{=} \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s, A_{t}=a\right] \\ &=\mathbb{E}_{\pi}\left[R_{t+1}+\gamma R_{t+2}+\gamma^{2} R_{t+3}+\ldots \mid S_{t}=s, A_{t}=a\right] \end{aligned}\).
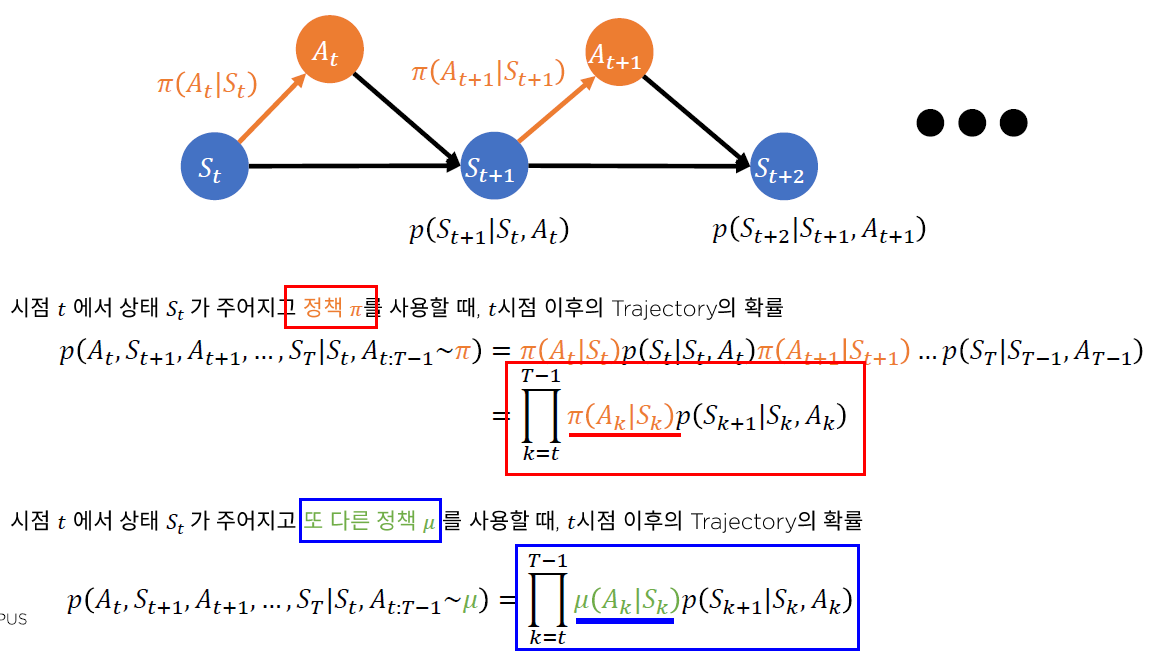
위 notation에서 \(\pi\)의 의미?
- 정책 \(\pi\)를 따를 경우, 발생할 trajectory의 분포에 대하나 expectation값!
(2) Example
(3) Importance Sampling
WHEN? \(p(x)\)에 대한 evaluation은 가능하나, sampling이 어려울 때!
HOW? 보다 쉬운 (sampling이 가능한) \(q(x)\)를 사용하여 \(\mathbb{E}_{x \sim P}[f(x)]\)를 추산하기
\(\begin{aligned} \mathbb{E}_{x \sim P}[f(x)] &=\sum_{x \in X} p(x) f(x) =\sum_{x \in X} q(x) \frac{p(x)}{q(x)} f(x) =\mathbb{E}_{x \sim Q}\left[\frac{p(x)}{q(x)} f(x)\right] \end{aligned}\).
위 방법론을, 우리의 Q함수에 적용할 경우 아래와 같다.
\(\begin{aligned} Q^{\pi}(s, a) & \stackrel{\text { def }}{=} \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s, A_{t}=a\right] \\ &=\mathbb{E}_{\mu}\left[\rho_{t: T-1} G_{t} \mid S_{t}=s, A_{t}=a\right] \end{aligned}\).
(4) 구체적 알고리즘
a) Key Idea : 임의의 행동 정책함수 \(\mu\)로 episode 생성 후 학습
b) Importance Sampling 개념 사용하여 아래를 계산
- \(G_{t}^{\pi / \mu}=\prod_{k=t}^{T-1} \frac{\pi\left(A_{k} \mid S_{k}\right)}{\mu\left(A_{k} \mid S_{k}\right)} G_{t}\).
c) MC-update 식 :
- \(Q\left(s_{t}, a_{t}\right) \leftarrow Q\left(s_{t}, a_{t}\right)+\alpha\left(G_{t}^{\pi / \mu}-Q\left(s_{t}, a_{t}\right)\right)\).
d)문제점?
-
\(\prod_{k=t}^{T-1} \frac{\pi\left(A_{k} \mid S_{k}\right)}{\mu\left(A_{k} \mid S_{k}\right)}\) 때문에, \(G_{t}^{\pi / \mu}\) 의 분산이 커질 수 있음. ( variance reduction needed! )
-
variance를 최소화 하는 \(\mu^{*}\)를 찾을 수 있긴 하지만,
- 1) \(\mu^{*}\)를 찾아야 하는 추가적인 노력 필요
- 2) 그렇게 해서 찾게 된 \(\mu^{*}\)가 exploration에 도움이 되지 않을 수도
\(\rightarrow\) 현실적으로 Off-policy MC가 잘 사용되지 않는 이유임.