( 참고 : Fastcampus 강의 )
[ 25. Value Function Approximation ]
Contents
- Introduction
- Function Approximation
- Value-function approximation
- State-Value Function
- Action-Value Function
- Q-learning with function approximation
1. Introduction
Planning(Dynamic) 혹은 Learning(MC, TD)을 통해 value-function을 추정해왔는데, 이때 우리는 아래 그림과 같은 tabular method를 활용하여 value-function을 구해왔었다
( * tabular method : grid 형식처럼, 각각의 state가 하나의 grid가 되고, action은 상/하/좌/우 중 하나로 움직여서 인접한 grid로 state가 넘어가는 단순한 형태 )

( https://cs.stanford.edu/people/karpathy/img/mdpdp.jpeg )
하지만 state & action의 경우가 훨씬 많아지고 복잡해지면, 이를 적용하기 쉽지 않다.
또한, 이를 일반화(generalization)할 수 있는 식을 찾기 위해 등장한 것이 “value-function approximation”이다.
2. Function Approximation
모든 값을 하나하나 저장하지 않고, 함수를 modeling해서 해당 함수(의 parameter)만을 저장하자!
-
value function : \(\hat{v}(s,w) \approx v_{\pi}(s)\)
-
action-value function : \(\hat{q}(s,a,w) \approx q_{\pi}(s,a)\)
위 식에서 parameter(혹은 weight) \(w\)를 잘 찾는 것(update)이 핵심이다. ( via NN )
https://encrypted-tbn0.gstatic.com/images
이를 통해, 아래의 3가지 function을 근사한다.
- 1 ) value function ( input : \(s\) )
- 2 ) action-value function ( input : \(s\) & \(a\) )
- 3 ) action-value function ( input : \(s\) )
장점
- 실제 존재하지 않는 data도 function을 통해 계산 가능
- 실제 data의 noise를 배제하고 학습 가능
- 고차원의 data도 효율적으로 저장 가능
Gradient Descent
주로 사용하는 모델은 NN로써, NN은 Gradient Descent(경사하강법)을 이용하여 적절한 parameter값을 찾아나간다. (기초적인 내용 생략) 이를 RL의 value-function에 적용하자면, update하는 대상은 true-value function이 되고, minimize해야 하는 objective function은 다음 식과 같이 true-value function과 approximated-value function의 MSE로 잡을 수 있다.
- \(J(w) = E_{\pi}[\{v_{\pi}(s) - v(s,w)\}^2]\).
3. Value-function Approximation
(1) State-Value-Function
(a) Loss Function
- \(J(w) =\mathrm{E}_{\pi}\left[\left\{v_{\pi}(s)-\hat{v}(s, \boldsymbol{w})\right\}^{2}\right]\).
(b) gradient
- \(\Delta w=-\frac{1}{2} \alpha \nabla_{w} J(w) = \alpha \mathrm{E}_{\pi}\left[\left(v_{\pi}(s)-\hat{v}(s, w)\right) \nabla_{w} \hat{v}(s, w)\right]\).
(c) gradient for MC & TD(0)
- MC : \(\Delta w=\alpha \mathrm{E}_{\pi}\left[\left(G_{t}-\hat{v}(s, w)\right) \nabla_{w}, \hat{v}(s, w)\right]\)
- TD(0) : \(\Delta w=\alpha \mathrm{E}_{\pi}\left[\left(R_{t+1}+\gamma \hat{v}\left(S_{t+1}, w\right)-\hat{v}(s, \boldsymbol{w})\right) \nabla_{w} \hat{v}(s, w)\right]\)
(2) Action-value function
(a) Loss Function
- \(J(w)=\mathrm{E}_{\pi}\left[\left\{q_{\pi}(S, A)-\hat{q}(S, A, \boldsymbol{w})\right\}^{2}\right]\).
(b) gradient
- \(\Delta w=-\frac{1}{2} \alpha \nabla_{\text {wr }} J(w)=\alpha \mathrm{E}_{\pi}\left[\left(q_{\pi}(S, A)-\hat{q}(S, A, \boldsymbol{w})\right) \nabla_{w} \hat{q}(S, A, \boldsymbol{w})\right]\).
(c) gradient for MC & TD(0) & TD(\(\lambda\))
- MC : \(\Delta w=\alpha \mathrm{E}_{\pi}\left[\left(G_{\mathrm{t}}-\hat{q}\left(S_{t}, A_{t}, \boldsymbol{w}\right)\right) \nabla_{w} \hat{q}\left(S_{t}, A_{t}, \boldsymbol{w}\right)\right]\)
- TD(0) : \(\Delta w=\alpha \mathrm{E}_{\pi}\left[\left(R_{\mathrm{t}+1}+\gamma \tilde{q}\left(S_{t+1}, A_{t+1}, w\right)-\bar{q}\left(S_{t}, A_{\mathrm{t}}, \boldsymbol{w}\right)\right) \nabla_{w} \hat{q}\left(S_{t}, A_{t}, \boldsymbol{w}\right)\right]\)
- TD(\(\lambda\)) :
- Forward : \(\Delta w= \alpha \mathrm{E}_{\pi}\left[\left(q_{\mathrm{t}}^{\lambda}-q\left(S_{\mathrm{t}}, A_{\mathrm{t}}, \boldsymbol{w}\right)\right) \nabla_{w} q\left(S_{\mathrm{t}}, A_{\mathrm{t}}, \boldsymbol{w}\right)\right]\).
- Backward : \(\Delta w =\alpha \mathrm{E}_{\pi}\left[\delta_{t} E_{\mathrm{t}}\right]\)
- \(\delta_{t} =R_{\mathrm{t}+1}+\gamma \hat{q}\left(S_{t+1}, A_{\mathrm{t}+1}, w\right)-\hat{q}\left(S_{t}, A_{t} \boldsymbol{w}\right)\).
- \(E_{\mathrm{t}} =\gamma \lambda E_{\mathrm{t-1}}+\nabla_{w} \hat{\mathcal{q}}\left(S_{t}, A_{t}, \boldsymbol{w}\right)\).
SGD
GD 대신 mini-batch 사용한 SGD도 이용 가능하다
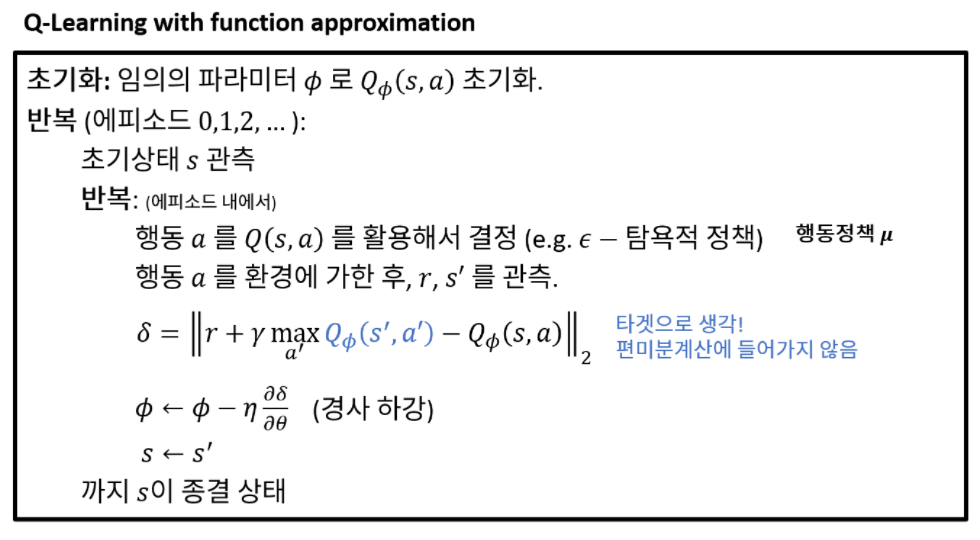
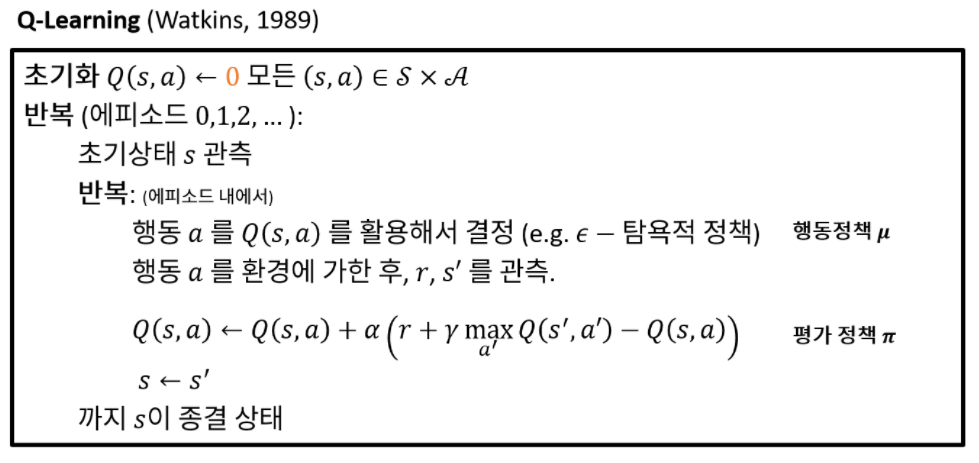
4. Q-learning with function approximation
(1) Function Approximation (X)
(2) Function Approximation (O)