DiffLoad: Uncertainty Quantification in Electrical Load Forecasting with the Diffusion Model
Contents
- Abstract
- Introduction
- Proposed Methods
- Epistemic uncertainty
- Aleatoric uncertainty
- Two kinds of uncertainties
0. Abstract
Uncertainties in loadd forecasting
- (1) Epistemic ( = model ) uncertainty
- (2) Aleatoric ( = data ) uncertainty
This paper proposes ..
- (1) Diffusion-based Seq2Seq to estimate “epistemic” uncertainty
- (2) Additive Cauchy distribution to estimate “aleatoric” uncertainty
1. Introduction
Previous diffusion TS methods ( i.e. TimeGrad )
-
Provide probabilistic forecasts to capture uncertainties
-
But do not clearly define what uncertainty they were modeling
Drawbacks of previous DL methods to capture uncertainties
- (1) Bayesian NN / Ensemble …
- Very expensive
- Bayesian NN: treats NN parammeters as r.v.
- Ensemble: requires multiple models
- Relies on Gaussian distn … limit the model’s expressive power & easily affected by noise
- Very expensive
- (2) Dropout
- Pros) Do not require assumptions
- Cons) Foreacasting perormance is unstable due to inconsistencies in training & testing
Proposed
Develop a new uncertainty quantification framework
- Estimate and separate 2 kinds of uncertainties
- (1) Aleatoric (data) uncertainty
- apply a heavy-tailed emission head
- reduce the bad efffect caused by noise
- (2) Epistmeic (model) uncertainty
- propose a diffusion-based framework to concentrate on the uncertainty of the model on the hidden state
- do not increase computational burden much!
2. Proposed Methods
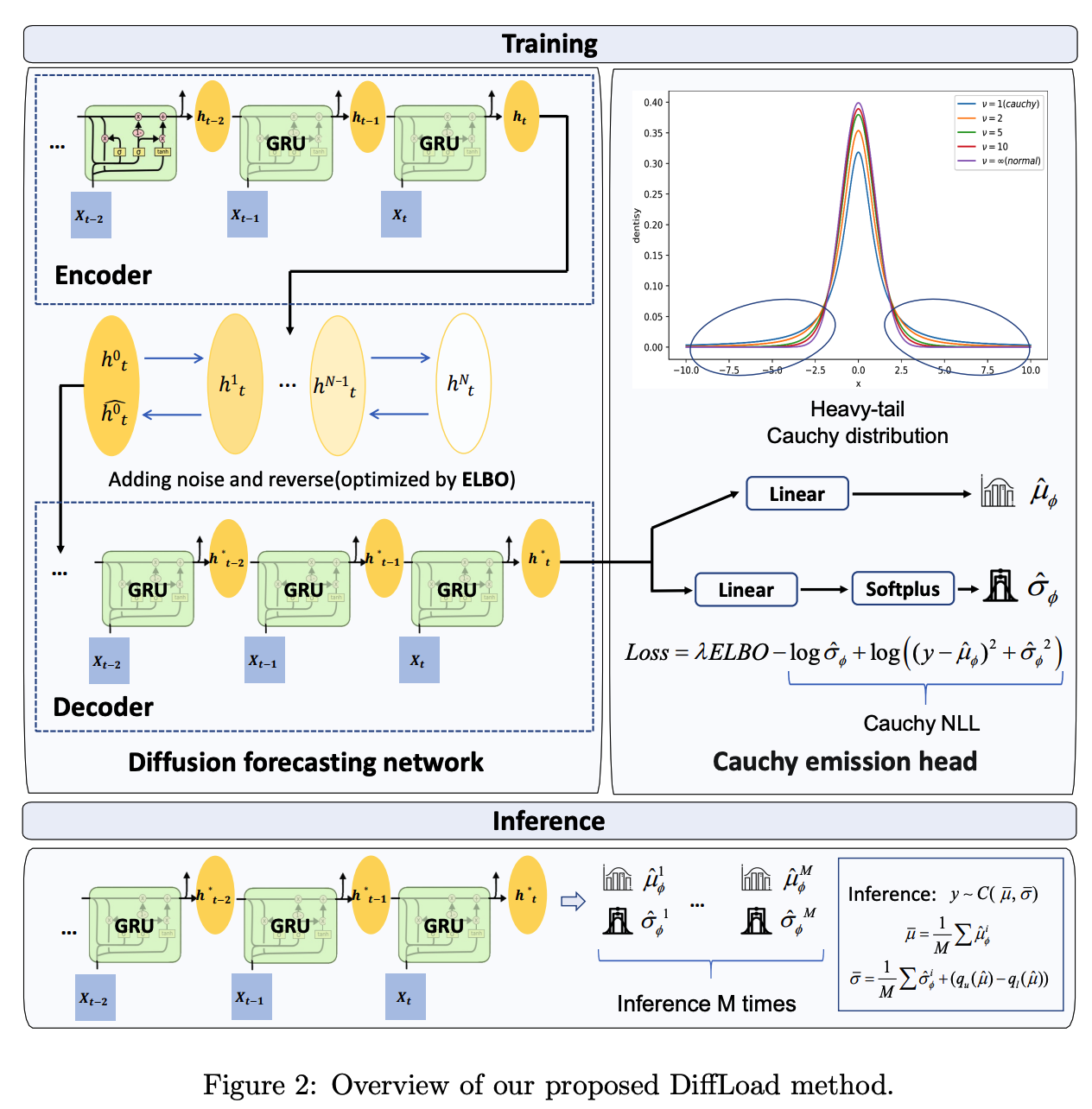
- Diffusion Forecasting network
- based on Seq2Seq
- for epistemic uncertainty
- Emission head
- based on Cauchy distribution
- for aleatoric uncertainty
(1) [Epistemic uncertainty] Diffusion Forecasting Network
Transform the hidden state of Seq2Seq, instead of original data itself.
Notation
- \(\mathbf{h}_{t+1}^0 \sim q_{\mathbf{h}}\left(\mathbf{h}_{t+1}^0\right)\) : Desired distribution of the hidden state
- \(p_\theta\left(\mathbf{h}_{t+1}^0\right)\) : Distribution we use to approximate the real distribution \(q_{\mathbf{h}}\left(\mathbf{h}_{t+1}^0\right)\).
Embedding:
- \(\mathbf{h}_{t+1}^0 =\operatorname{GRU}\left(X_{t+1}, \mathbf{h}_t\right)\).
Forward Diffusion
- (1 step) \(\mathbf{h}_{t+1}^{n+1} =\sqrt{\alpha_n} \mathbf{h}_{t+1}^n+\sqrt{1-\alpha_n} \epsilon, \epsilon \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)
- (N step) \(\mathbf{h}_{t+1}^N=\sqrt{\overline{\alpha_N}} \mathbf{h}_{t+1}^0+\sqrt{1-\overline{\alpha_N}} \epsilon, \epsilon \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)
Modeling
- \(p_\theta\left(\mathbf{h}^{n-1} \mid \mathbf{h}^n\right):=\mathcal{N}\left(\mathbf{h}^{n-1} ; \boldsymbol{\mu}_\theta\left(\mathbf{h}^n, n\right), \boldsymbol{\Sigma}_\theta\left(\mathbf{h}^n, n\right)\right)\).
Loss function
- \(\mathbb{E}_{\mathbf{h}^0, \epsilon \sim \mathcal{N}(0, \mathbf{I})} \mid \mid \epsilon-\epsilon_\theta\left(\sqrt{\bar{\alpha}_n} \mathbf{h}^0+\sqrt{1-\bar{\alpha}_n} \epsilon, n\right) \mid \mid ^2\).
(2) [Aleatoric uncertainty] Robust Cauchy Emission Head
Emission head:
-
Controls the conditional error distribution btw obervation & forecast
-
Instead of Gaussian, use Cauchy distribution
-
modeled by “location” & “scale”
-
\(f(x ; \mu, \sigma)=\frac{1}{\pi \sigma\left[1+\left(\frac{x-\mu}{\sigma}\right)^2\right]}=\frac{1}{\pi}\left[\frac{\sigma}{(x-\mu)^2+\sigma^2}\right]\).
-
Model in detail
- Parameters of emission head: given by the Decoder parameterized by \(\phi\)
- mark * above to indicate the input of the decoder
- \(\mathbf{h}_{t+1}^* =\operatorname{GRU}\left(X_t, \mathbf{h}_t^*\right)\).
- \(p_\phi\left(X_{t+1} \mid \mathbf{h}_{t+1}^*\right) =\mathcal{C}\left(X_{t+1} ; \boldsymbol{\mu}_{\phi(t+1)}, \boldsymbol{\sigma}_{\phi(t+1)}\right)\).
- \(\boldsymbol{\mu}_{\phi(t+1)} =\operatorname{Linear}_1\left(\mathbf{h}_{t+1}^*\right)\).
- \(\boldsymbol{\sigma}_{\phi(t+1)} =\operatorname{SoftPlus}\left[\operatorname{Linear}_2\left(\mathbf{h}_{t+1}^*\right)\right]\).
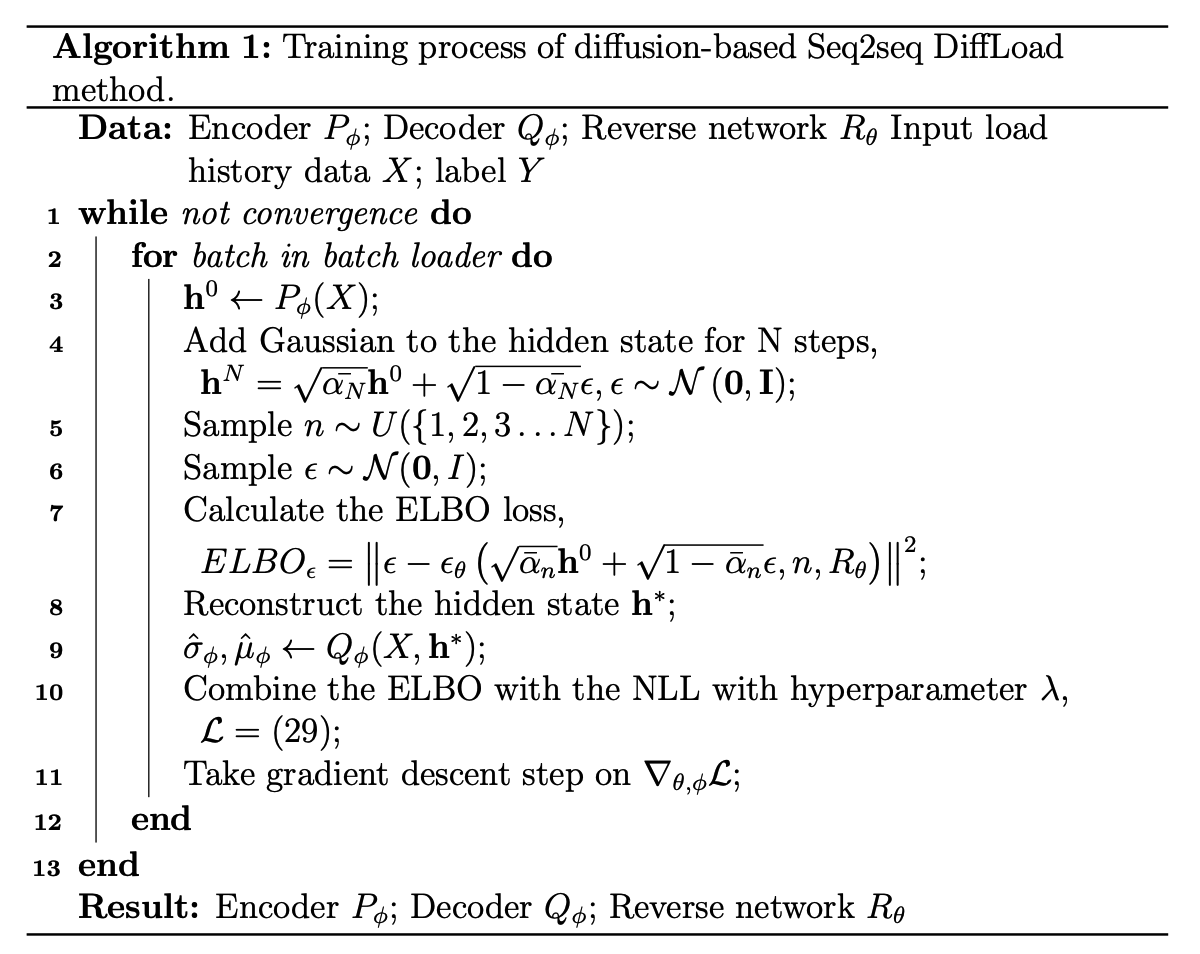
(3) Training & Inference
a) Training
Step 1) Obtain \(\hat{\mathbf{h}}_{t+1}^0\) after inputting the data into the diffusion-based Encoder.
- Concentrate the uncertainty of the model into the hidden state
Step 2) Put the \(\hat{\mathbf{h}}_{t+1}^0\) into the Decoder
- Output of the Decoder = parameter of the emission distribution
- Optimized by NLL
Loss function
- \(\mathcal{L}=\lambda E L B O-\log \hat{\sigma}_\phi+\log \left(\left(y-\hat{\mu}_\phi\right)^2+\hat{\sigma}_\phi^2\right)\).
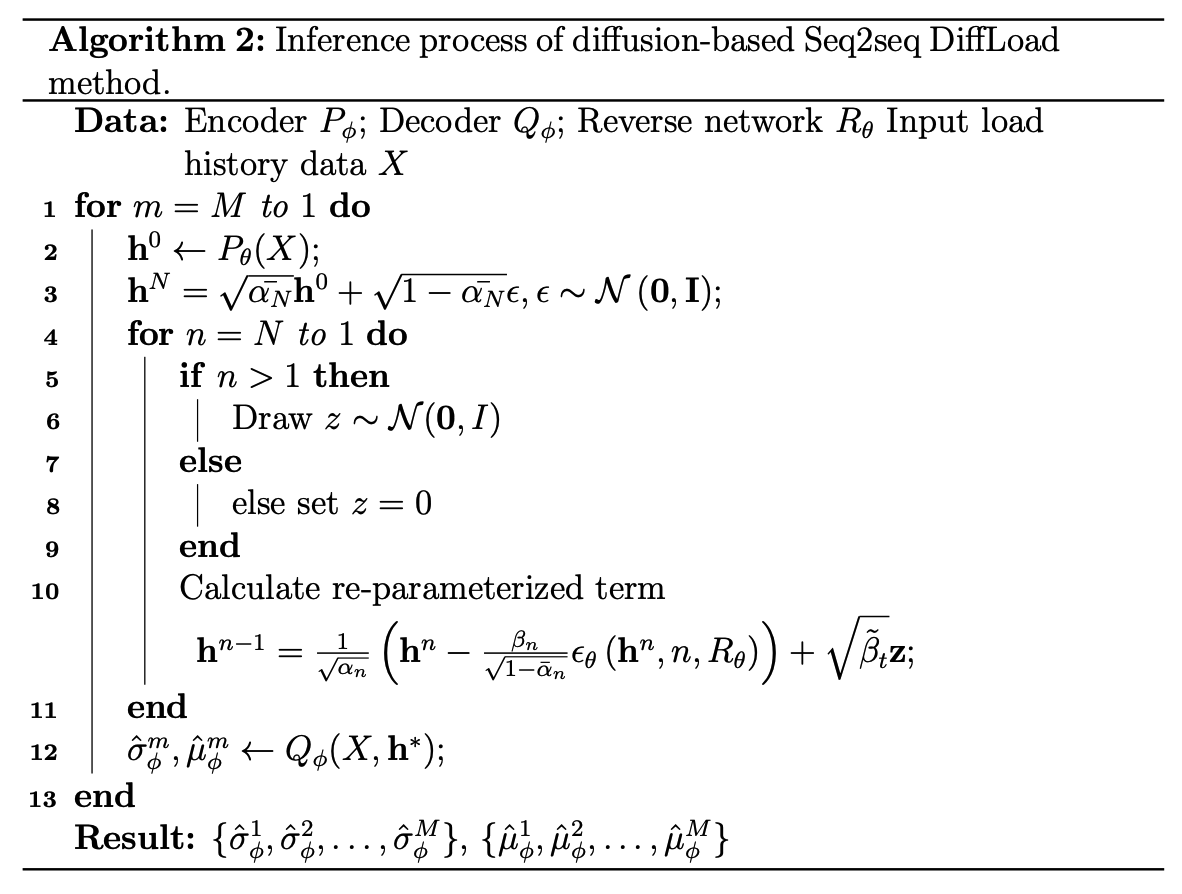
b) Inference
Infer for \(M\) times
Output of the Encoder undergoes the process of adding and removing noise
\(\rightarrow\) Randomness
Output of our model is the parameters : average
- \(\bar{\mu}=\frac{1}{M} \sum \hat{\mu}_\phi^i\).
c) Two kinds of uncertainties
- Scale parameter
- represent aleatoric uncertainty
- Distnace btw upper / lower quantiles of location paramteres
- obtained via multiple infferences
- represent epistemic uncertainty
\(\begin{aligned} \bar{\sigma} & =\hat{\sigma}_\phi+\hat{\sigma}_\theta, \\ & =\frac{1}{M} \sum \hat{\sigma}_\phi^i+\left(q_u(\hat{\mu})-q_l(\hat{\mu})\right) \end{aligned}\).