
A Transformer-based Framework for Multivariate Time Series Representation Learning (2020,22)
Contents
- Abstract
- Introduction
- Related Works
- Methodology
- Base Model
- Regression & Classification
- Unsupervised Pre-training
0. Abstract
-
TRANSFORMER for UNSUPERVISED representation learning of MTS
- downstream task
- 1) regression
- 2) classification
- 3) forecasting
- 4) missing value imputation
- works even when the data is LIMITED!
1. Introduction
problem : labeled data is limited!
\(\rightarrow\) how to make high accuracy, by using only a limited amount of labeled data ?
Non-deep learning methods
- ex) TS-CHIEF (2020), HIVE-COTE (2018), ROCKET (2020)
Deep learning methods
- ex) InceptionTime (2019), ResNet (2019)
this paper uses TRANSFORMER encoder for learning MTS
- multi-headed attention
- leverage unlabeled data
-
several downstream tasks
- ( can be even trained on CPUs )
2. Related Work
(1) Regression & Classification of TS
ROCKET :
- fast & linear classifier on top of features extracted by a flat collection of convolutional kernels
HIVE-COTE, TS-CHIEF
- very sophisticated
- incorporate expert insights on TS data
- large, heterogeneous ensembles of classifiers
\(\rightarrow\) only on UNIVARIATE time series
(2) Unsupervised learning for MTS
mostly “autoencoders”
-
[1] Kopf et al (2019), Fortuin et al (2019)
- VAE based
- focused on “clustering” & “vizualization”
-
[2] Malhotra et al (2017)
-
multi-layered LSTM + attention
-
two loss terms
- 1) input reconstruction
- 2) forecasting loss
-
-
[3] Bianchi et al (2019)
- encoder : stacked bidirectional RNN
- decoder : stacked RNN
- use kernel matrix as prior
- encourage learning “similarity-preserving” representation
- evaluation on “missing value imputation” & “classification”
-
[4] Lei et al (2017)
- TS clustering
- matrix factorization
- distance : DTW
- [5] Zhang et al (2019)
- composite convolutional LSTM + attention
- reconstruct “correlation matrices” ( between MTS )
- only for anomaly detection
- [6] Jansen et al (2018)
- triplet loss
- [7] Franceschi et al (2019)
- triplet loss + deep causal CNN with dilation
- ( to deal with very LONG ts )
(3) Transformer models for time series
[1] Li et al (2019), Wu et al (2020)
- transformer for UNIVARIATE ts
[2] Lim et al (2020)
- transformer for MULTI-HORIZON univariate ts
- interpretation of temporal dynamics
[3] Ma et al (2019)
- encoder-decoder + SELF-ATTENTION for missing values in MTS
(4) This work
generalize the use of transformers for MTS
3. Methodology
(1) Base Model
Introduction
- 1) use only ENCODER
- 2) compatible with MTS
- 3) notation
- \(\mathbf{X} \in \mathbb{R}^{w \times m}\) : one training sample
- \(w\) : length ( if \(m=1\), univariate TS )
- \(m\) : # of variables
-
\[\mathbf{x}_{\mathbf{t}} \in \mathbb{R}^{m}\]
- vector at time \(\mathbf{t}\)
- \(\mathbf{X} \in \mathbb{R}^{w \times m}=\) \(\left[\mathrm{x}_{1}, \mathrm{x}_{2}, \ldots, \mathrm{x}_{\mathrm{w}}\right] .\)
- \(\mathbf{X} \in \mathbb{R}^{w \times m}\) : one training sample
Steps ( for \(\mathrm{x}_{\mathrm{t}}\) )
-
1) normalization
-
2) project onto \(d\)-dim vector space
- [eq 1] \(\mathbf{u}_{\mathrm{t}}=\mathbf{W}_{\mathbf{p}} \mathbf{x}_{\mathbf{t}}+\mathbf{b}_{\mathbf{p}}\).
- \(\mathbf{W}_{\mathbf{p}} \in \mathbb{R}^{d \times m}, \mathbf{b}_{\mathbf{p}} \in \mathbb{R}^{d}\) : learnable parameters
- \(\mathbf{u}_{\mathrm{t}}\) : word embedding (for NLP)
- [eq 1] \(\mathbf{u}_{\mathrm{t}}=\mathbf{W}_{\mathbf{p}} \mathbf{x}_{\mathbf{t}}+\mathbf{b}_{\mathbf{p}}\).
-
3) positional encoding & ( multiply matrices )
-
becomes Q,K,V for self-attention
-
\(U \in \mathbb{R}^{w \times d}=\left[\mathbf{u}_{1}, \ldots, \mathbf{u}_{\mathbf{w}}\right]: U^{\prime}=U+W_{\text {pos }}\).
where \(W_{\text {pos }} \in \mathbb{R}^{w \times d}\).
-
use learnable PE
-
Alternative
-
\(\mathbf{u}_{\mathbf{t}}\) : need not be obtained from (transformed feature vectos at time step \(t\))
( instead, can use 1D- convolutional layer )
- [eq 2] \(u_{t}^{i}=u(t, i)=\sum_{j} \sum_{h} x(t+j, h) K_{i}(j, h), \quad i=1, \ldots, d\).
- # of input channel : 1
- # of output channel : \(d\)
- kernel ( \(K_{i}\) ) size : \((k,m)\)
- alternative
- 1) K & Q : via 1D-conv ( [eq 2] )
- 2) V : via FC layers ( [eq 1] )
- especially useful in univariate TS
Padding
- individual samples may have DIFFERENT LENGTH!
- maximum length = \(w\)
- shorter samples are padded ( masked with \(-\infty\) )
Normalization
- layer normalization (X)
- batch normalization (O)
- \(\because\) mitigate effect of outliers
(2) Regression & Classification
-
Final representation :
- \(\mathbf{z}_{\mathbf{t}} \in \mathbb{R}^{d}\) (for each time step)
-
Concatenated :
- \[\overline{\mathbf{z}} \in \mathbb{R}^{d \cdot w}=\left[\mathbf{z}_{1} ; \ldots ; \mathbf{z}_{\mathbf{w}}\right]\]
-
Output :
-
\(\hat{\mathbf{y}}=\mathbf{W}_{\mathbf{o}} \overline{\mathbf{z}}+\mathbf{b}_{\mathbf{o}}\).
where \(\mathbf{W}_{\mathbf{o}} \in \mathbb{R}^{n \times(d \cdot w)}\)
- \(n=1\) for regression
- \(n=K\) for K-class classification
-
-
Regression ex)
- data :
- simultaneous temperature & humidity of 9 rooms
- weather, climate data (temperature, pressure, humidity, wind speed … )
- goal :
- predict total energy consumption of a house for that day
- \(n\) :
- number of scalars to be estimated
- (if wish to estimate 3 rooms, \(n=3\) )
- data :
-
Classification ex)
- \(\hat{\mathbf{y}}\) will be passed through “softmax” & “CE loss”
While fine-tuning ….
- method 1) allow training of all weights ( fully trainable model )
- method 2) freeze all, except output layer ( static representation )
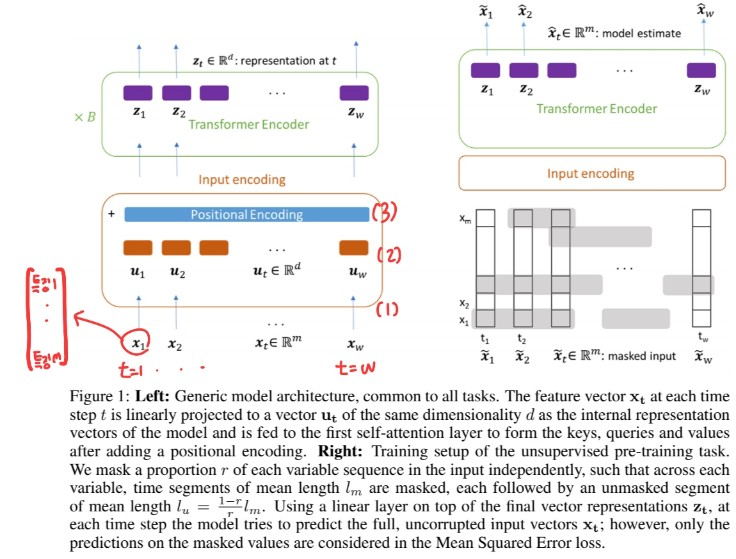
(3) Unsupervised Pre-training
“autoregressive task” of denoising the input
- idea :
- set part of input to \(0\) & predict the masked value
- notation :
- binary noise mask : \(\mathbf{M} \in \mathbb{R}^{w \times m}\)
- element-wise multiplication : \(\tilde{\mathbf{X}}=\mathbf{M} \odot \mathbf{X}\)
\(\begin{gathered} \hat{\mathbf{x}}_{\mathbf{t}}=\mathbf{W}_{\mathbf{o} \mathbf{z}_{\mathbf{t}}}+\mathbf{b}_{\mathbf{o}} \\ \mathcal{L}_{\mathrm{MSE}}=\frac{1}{\mid M \mid} \sum_{(t, i) \in M} \sum_{(\hat{x}(t, i)-x(t, i))^{2}} \end{gathered}\).
- differs from original denoising autoencoders,
- in that loss only considers data from MASKED input