
DeepAR : Probabilistic Forecasting with Autoregressive Recurrent Networks (2019)
Contents
- Abstract
- Introduction
- Model
- Likelihood model
- Training
- Scale Handling
- Features
0. Abstract
Probabilistic Forecasting : 비즈니스에서 핵심!
DeepAR을 제안한다
- produce “accurate probabilistic forecast”
- based on training an auto-regressive RNN
1. Introduction
Prevalent Forecasting method
- setting of forecasting “individual or small groups” of time series
- each time series are independently estimated
- model is manually selected
- mostly based on..
- 1) Box-Jenkins methodology
- 2) Exponential Smoothing Techniques
- 3) State space models
Recent years
- faced with forecasting “thousands/millions of related time series”
- use data from related time series
- more complex models (w.o overfitting)
- alleviate time & labor intensive manual feature engineering
DeepAR
- learns a global model
- from historical data of all time series
- build upon deep learning
- tailors a similar LSTM-based RNN architecture
- to solve probabilistic forecasting problem
[ Contributions ]
- propose RNN architecture for probabilistic forecasting,
- incorporate a negative Binomial likelihood for count data
- special treatment for the case when magnitudes of the time series vary widely
- experiment on real world data
Key Advantages of DeepAR
-
learns seasonal behavior and dependencies on given covariates across time series
\(\rightarrow\) minimal manual feature engineering is needed to capture complex, group-dependent behavior
-
makes probabilistic forecasts in the form of Monte Carlo samples
\(\rightarrow\) can be used to compute consistent quantile estimates
-
by learning from similar items, able to provide forecasts for items with little or no history at all
-
does not assume Gaussian noise, but can incorporate a wide range of likelihood functions
\(\rightarrow\) allow the user to choose one that is appropriate for the statistical properties of the data
2. Model
Notation
- \(z_{i, t}\) : value of time series \(i\) at time \(t\)
- \(\mathbf{x}_{i, 1: T}\) : covariates that are assumed to be known for all time points
- goal : model \(P\left(\mathbf{z}_{i, t_{0}: T} \mid \mathbf{z}_{i, 1: t_{0}-1}, \mathbf{x}_{i, 1: T}\right)\)
- \(\left[1, t_{0}-1\right]\) : conditioning range
- \(\left[t_{0}, T\right]\) : prediction range
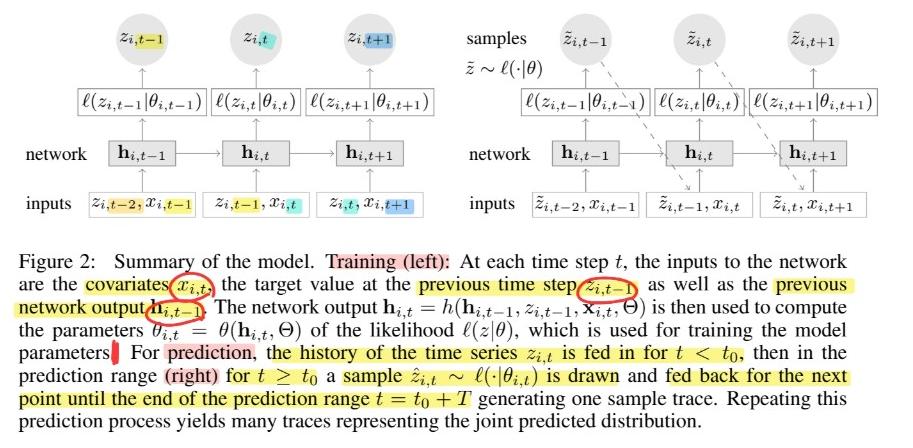
based on Autoregressive Recurrent Network architecture
model distribution : \(Q_{\Theta}\left(\mathbf{z}_{i, t_{0}: T} \mid \mathbf{z}_{i, 1: t_{0}-1}, \mathbf{x}_{i, 1: T}\right)\)
-
factorized as
\(Q_{\Theta}\left(\mathbf{z}_{i, t_{0}: T} \mid \mathbf{z}_{i, 1: t_{0}-1}, \mathbf{x}_{i, 1: T}\right)=\prod_{t=t_{0}}^{T} Q_{\Theta}\left(z_{i, t} \mid \mathbf{z}_{i, 1: t-1}, \mathbf{x}_{i, 1: T}\right)=\prod_{t=t_{0}}^{T} \ell\left(z_{i, t} \mid \theta\left(\mathbf{h}_{i, t}, \Theta\right)\right)\).
-
\(\mathbf{h}_{i, t}=h\left(\mathbf{h}_{i, t-1}, z_{i, t-1}, \mathbf{x}_{i, t}, \Theta\right)\).
Information about the observations in the conditioning range \(\mathbf{z}_{i, 1: t_{0}-1}\)
is transferred to the prediction range through the initial state \(\mathbf{h}_{i, t_{0}-1}\)
Given the model parameters \(\Theta\)…
can obtain joint samples \(\tilde{\mathbf{z}}_{i, t_{0}: T} \sim\) \(Q_{\Theta}\left(\mathbf{z}_{i, t_{0}: T} \mid \mathbf{z}_{i, 1: t_{0}-1}, \mathbf{x}_{i, 1: T}\right)\) via ancestral sampling
- step 1) obtain \(\mathbf{h}_{i, t_{0}-1}\) by \(\mathbf{h}_{i, t}=h\left(\mathbf{h}_{i, t-1}, z_{i, t-1}, \mathbf{x}_{i, t}, \Theta\right)\)
- for \(t=1,...,t_0\)
- step 2) sample \(\tilde{z}_{i, t} \sim \ell\left(\cdot \mid \theta\left(\tilde{\mathbf{h}}_{i, t}, \Theta\right)\right)\)
- for \(t=t_0,...T\)
- where \(\tilde{\mathbf{h}}_{i, t}=h\left(\mathbf{h}_{i, t-1}, \tilde{z}_{i, t-1}, \mathbf{x}_{i, t}, \Theta\right)\)
\(\rightarrow\) samples can be used to compute quantities of interests ( ex. quantile )
(1) Likelihood model
two choices :
- 1) (real-valued) Gaussian
- 2) (count data) Negative-binomial
a) Gaussian
mean and standard deviation, \(\theta=(\mu, \sigma)\)
\(\begin{aligned} \ell_{\mathrm{G}}(z \mid \mu, \sigma) &=\left(2 \pi \sigma^{2}\right)^{-\frac{1}{2}} \exp \left(-(z-\mu)^{2} /\left(2 \sigma^{2}\right)\right) \\ \mu\left(\mathbf{h}_{i, t}\right) &=\mathbf{w}_{\mu}^{T} \mathbf{h}_{i, t}+b_{\mu} \quad \text { and } \quad \sigma\left(\mathbf{h}_{i, t}\right)=\log \left(1+\exp \left(\mathbf{w}_{\sigma}^{T} \mathbf{h}_{i, t}+b_{\sigma}\right)\right) \end{aligned}\).
b) Negative-binomial
mean \(\mu \in \mathbb{R}^{+}\)and a shape parameter \(\alpha \in \mathbb{R}^{+}\)
\(\begin{aligned} \ell_{\mathrm{NB}}(z \mid \mu, \alpha) &=\frac{\Gamma\left(z+\frac{1}{\alpha}\right)}{\Gamma(z+1) \Gamma\left(\frac{1}{\alpha}\right)}\left(\frac{1}{1+\alpha \mu}\right)^{\frac{1}{\alpha}}\left(\frac{\alpha \mu}{1+\alpha \mu}\right)^{z} \\ \mu\left(\mathbf{h}_{i, t}\right) &=\log \left(1+\exp \left(\mathbf{w}_{\mu}^{T} \mathbf{h}_{i, t}+b_{\mu}\right)\right) \quad \text { and } \quad \alpha\left(\mathbf{h}_{i, t}\right)=\log \left(1+\exp \left(\mathbf{w}_{\alpha}^{T} \mathbf{h}_{i, t}+b_{\alpha}\right)\right) \end{aligned}\).
(2) Training
given data
- 1) \(\left\{\mathbf{z}_{i, 1: T}\right\}_{i=1, \ldots, N}\)
- 2) associated covariates \(\mathbf{x}_{i, 1: T}\)
optimize parameters \(\Theta\) by maximizing log-likelihood :
- \(\mathcal{L}=\sum_{i=1}^{N} \sum_{t=t_{0}}^{T} \log \ell\left(z_{i, t} \mid \theta\left(\mathbf{h}_{i, t}\right)\right)\).
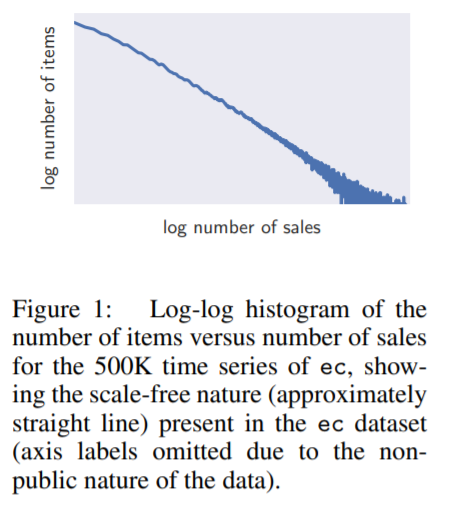
(3) Scale Handling
Problem : data that shows power-law of scales as…
Two problems caused by this :
Problem 1
- network has to learn to scale the input & then invert this scaling at the output
Solution 1
- divide the autoregressive inputs \(z_{i,t}\) ( or \(\tilde{z_{i,t}}\) ) by item-dependent scale factor \(\nu_i\)
- multiply the scale-dependent likelihood params by the same factor
- ex) for Neg-binom…
- \(\mu=\nu_{i} \log \left(1+\exp \left(o_{\mu}\right)\right)\).
- \(\alpha=\log \left(1+\exp \left(o_{\alpha}\right)\right) / \sqrt{\nu_{i}}\).
- where \(o_{\mu}, o_{\alpha}\) are outputs of NN
- for real-valued data, just normalize in advance!
Problem 2
-
imbalance in the data
\(\rightarrow\) stochastic optimization procedure visit small number time-series with a large scale very infrequently
Solution 2
- sample the examples non-uniformly during training
- probability of selecting a window from an example with scale \(\nu_i\) is proportional to \(\nu_i\)
(4) Features
covariates \(\mathbf{x_{i,t}}\) can be item-dependent/independent