
End-to-end Multi-task Learning of Missing Value Imputation and Forecasting in Time-Series Data (2021)
Contents
- Abstract
- Introduction
- Related Works
- DL based imputation
- Imputation using GAN
- Problem Formulation
- Proposed Method
- Imputation using GAN
- Decaying mechanism for missing values
- Gated Classifier & end-to-end multitask learning
0. Abstract
Multivariate time series prediction
-
hard, because of MISSING DATA
\(\rightarrow\) may be better not to rely on estimated value of missing data
-
OBSERVED DATA may have noise
\(\rightarrow\) denoise!
Propose a novel approach, that can automatically utilize the optimal combination of
- 1) observed values
- 2) estimated values
to generate not only “complete”, but also “noise-reduced” data
1. Introduction
DL method :
- SOTA in predicting MTS data with missing values
- mostly via appropriate substitution
However, there has not been work that raises a question of
whether imputation results based on AE or adversarial learning are appropriate for predicting downstream task
Introduce novel DL algorithm that…
-
gates real data & missing data
to remove possible noise from our input to downstream task modules
-
adopt GAN to estimate the true distn of the observed data
-
adopt input dropout method
to learn the true distn of data via destruction-reconstruction process
In contrast to previous SOTA ( = add noise to destroy original data )..
- drop out the known values and learn to reconstruct them
Propose a time decay mechanism that considers the sequential changes in time interval
Contribution
-
novel end-to-end model, that imputes missing values & performs downstream tasks
simultaneously, with (1) gating module & (2) input dropping
-
SOTA
-
synthetic dataset to validate
2. Related Work
(1) DL based imputation
-
RNN architecture
(process temporal information)
-
effectively handling varying time gaps between observed variables
-
missing inputs are imputed with temporally decayed statistics
-
Cao et al(2018)
- improved downstream task by training the imputation & downstream task SIMULTANEOUSLY
(2) Imputation using GAN
- (limitation) reliability of the generator output was not considered
3. Problem Formulation
Notation
-
\(\left\{X_{n}\right\}_{n=1}^{N}\) : MULTIVARIATE time series
( \(\left\{l_{n}\right\}_{n=1}^{N}\) : corresponding label )
-
\(X=\left\{x_{1}, x_{2}, \ldots, x_{T}\right\} \in\left\{X_{n}\right\}_{n=1}^{N}\).
with label \(l \in\left\{l_{n}\right\}_{n=1}^{N}\) is a multivariate sequence of length \(T\),
where \(x_{t} \in \mathbb{R}^{d}\) is \(t\)-th observation of \(X\) at time stamp \(s_t\)
-
\(x_{t}^{i}\) : \(i\)-th variable of the \(t\)-th observation
-
-
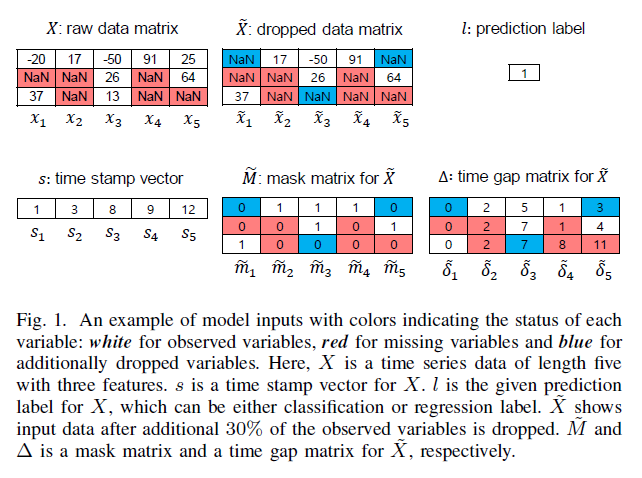
\(M=\left\{m_{1}, m_{2}, \ldots, m_{T}\right\}\).
- mask matrix whose element \(m_{t}^{i} \in\{0,1\}\)
- \(m_{t}^{i}=1\) : observed
- \(m_{t}^{i}=0\) : missing
-
\(\tilde{X}\) : dropped matrix
- generated by additionally dropping a portion of the observed variables from \(X\) to make model learn how to impute missing values
- corresponding mask matrix : \(\tilde{M}\)
-
\(\Delta=\left\{\delta_{1}, \delta_{2}, \ldots, \delta_{T}\right\}\) : time gap matrix
-
의미 : time interval from the last observation for each variable of \(\tilde{X}\)
- \(\delta_{t}^{i}\) : how long \(\tilde{x}^{i}\) has been missing consecutively until the \(t\)-th time step
- \(\delta_{t}^{i}= \begin{cases}0 & \text { if } t=0 \\ s_{t}-s_{t-1}+\delta_{t-1}^{i} & \text { if } t>1, m_{t-1}^{i}=0 \\ s_{t}-s_{t-1} & \text { if } t>1, m_{t-1}^{i}=1\end{cases}\).
-
Goal : predicting \(l\) & \(X\), using \(\tilde{X}, \tilde{M}, \Delta\)
-
propose an end-to-end GANs-based model , that performs (1) & (2) jointly
-
(1) missing value imputation
-
(2) down stream task ( reg / cls )
( mainly focus on classification problem )
-
4. Proposed Method
details of proposed methods
consists of 2 modules
- 1) imputation module
- 2) prediction module
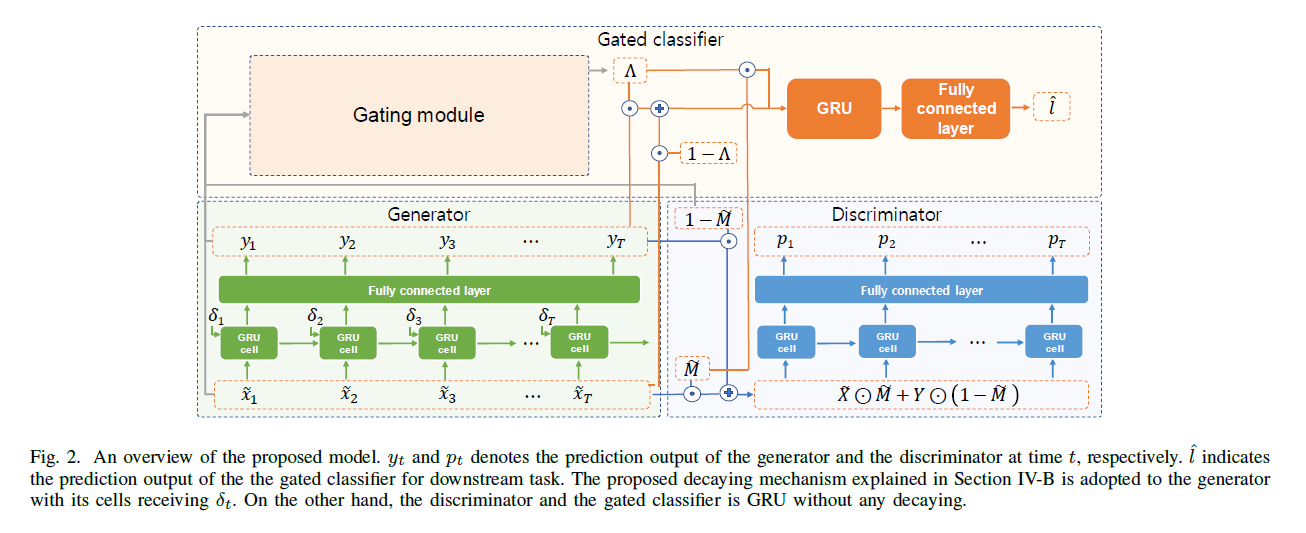
(1) Imputation using GAN
Wasserstein GAN
-
\(G\) & \(D\) : GRU based RNNs
- \(G\) : bidirectional RNN with decaying cell
-
input) \(x_{t}\)
-
output) same \(x_{t}\)
-
handle 2 kinds of input
(1) observed ( \(m_t^i =1\) ) … \(G\) = auto encoder
(2) missing ( \(m_t^i =0\) ) … reconstruct (X), estimate a new value (O)
-
- \(G\) : bidirectional RNN with decaying cell
Corrupted Data \(\tilde{X}\)
-
obtained by randomly removing known variables given \(X\)
-
\(\tilde{X} \sim \operatorname{Drop}_{\alpha}(\tilde{X} \mid X)\).
-
( dropout rate \(\alpha\) : hyperparameter )
-
( under missing rate \(r\) )
randomly chosen \(100 \alpha \%\) of \(100(1-r) \%\) observed variables are dropped
Updated Mask Matrix \(\tilde{M}\)
- zero = denote where missing values are in \(\tilde{X}\) & artificially dropped values
\(r\) 이 크면, remove variable하는게 위험하다? NO!
\(\rightarrow\) 만약 corrupted 데이터가 아닌 raw 데이터에서만 온다면, generator cannot learn how to impute missing values!
따라서, propose DROPPING function!
- help the model to predict appropriate values for missing values
[ 요약 ] Generator
- (observed 데이터에 대해) auto-encoder
- (missing 데이터에 대해) authentic generator
Missing data : temporarily 다른 값으로 impute 되어 있어야
( 일단 input으로 넣긴 넣어야 하니까 )
- ex) 여기서는 mean imputation
- 따라서, input of \(G\) : \(Z=[\tilde{X} ;(1-\tilde{M})]\).
Loss Function
loss of \(G\) for reconstructing input :
- \(L_{G, r}=\mid \mid (G(Z)-X) \odot M \mid \mid _{F}^{2}\).
loss of \(G\) for minimizing adversarial loss :
- \(L_{D}=\mathbb{E}[D(G(Z)) \odot(1-\tilde{M})]+\mathbb{E}[-D(X) \odot \tilde{M}]\).
- \(L_{G, a}=\mathbb{E}[-D(G(Z)) \odot(1-\tilde{M})]\).
Final Loss for generator :
- \(L_{G}=L_{G, r}+\beta L_{G, a}\).
(2) Decaying mechanism for missing values
“Decaying” mechanism for generator
(previous method)
- common equation for \(\gamma_t\) ( = decaying rate, considering time gap )
- \(\gamma_{t}^{c}=\exp \left(-\max \left(0, W_{\gamma^{c}} \delta_{t}+b_{\gamma^{c}}\right)\right)\).
(proposed method)
previous method의 문제
-
only uses \(t\)-th time gap,
when measuring the decaying rate for \((t-1)\)-th hidden state vector
-
fails to handle the temporal change of time gap values over time
제안한 방법
- decaying method that feeds \(k\) time gap vectors, \(\delta_{t-k+1: t}\)
- \(\eta_{t}=\max \left(0, W_{\eta} \delta_{t-k+1: t}+b_{\eta}\right)\).
- \(\gamma_{t}=\exp \left(-\max \left(\operatorname{Maxpool}\left(0, W_{\gamma} \eta_{t}^{T}+b_{\gamma}\right)^{T}\right)\right)\).
여러 패턴의 temporal time gap variations 있다는 가정 하에,
\(\rightarrow\) map \(\eta_t\) into 2-d space
introduce input decaying, that downscales input data \(\tilde{x_t}\) with the rate of \((1-\gamma_t)\)
[ 요약 ] update functions of GRU (with decaying mechanism)
\(\begin{gathered} h_{t-1}=\gamma_{t} \odot h_{t-1}, \quad z_{t}=\left[\left(1-\gamma_{t}\right) ; 0\right] \odot z_{t} \\ u_{t}=\sigma\left(W_{u}\left[h_{t-1} ; z_{t}\right]+b_{u}\right), \quad r_{t}=\sigma\left(W_{r}\left[h_{t-1} ; z_{t}\right]+b_{r}\right) \\ \tilde{h}_{t}=\tanh \left(W_{h}\left[r_{t} \odot h_{t-1} ; z_{t}\right]+b_{h}\right) \\ h_{t}=\left(1-u_{t}\right) \odot h_{t-1}+u_{t} \odot \tilde{h}_{t} \end{gathered}\).
(3) Gated Classifier & end-to-end multitask learning
introduce novel model, using gating mechanism, gated classifier \(C\)
- “considers the RELIABILITY of imputation results”
-
mixes “observations” & “predictions” of imputation module
- ex) missing rate 높아 \(\rightarrow\) little info that we can extract to estimate its distribution
Gated Classifier의 gating module
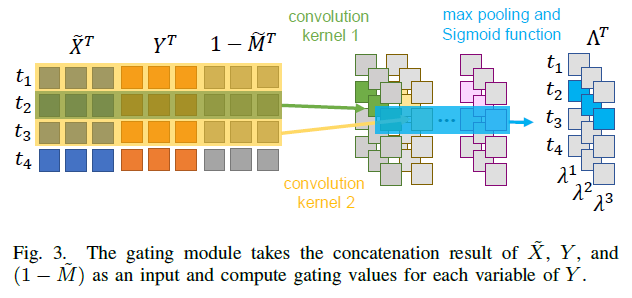
-
1) define a gating matrix \(\Lambda \in \mathbb{R}^{d \times T}\)
( 의미 : degree of reliability for \(Y\) ( = output of the generator) )
( 요소 : \(\lambda_{t}^{i} \in\{0,1\}\) )
-
2) use \(\tilde{X}\) & \(Y\) & \(\tilde{M}\) to estimate relative confidence of \(Y\) compared to \(\tilde{X}\)
( concatenate! \(\left[\tilde{X}^{T} ; Y^{T} ;\left(1-\tilde{M}^{T}\right)\right]^{T}\) …. \(3d \times T\) matrix )
-
3) compute convolution of above concatenation
-
mapping : \(\mathbb{R}^{3 d \times T} \rightarrow \mathbb{R}^{d \times T}\)
-
kernel size : \((3d, *)\)
ex) kernel size = \((3d, 3)\) :
\(\begin{gathered} {\left[\left[\tilde{x}_{t-1}^{T} ; y_{t-1}^{T} ;\left(1-\tilde{m}_{t-1}^{T}\right)\right]^{T}\right.} \\ {\left[\tilde{x}_{t}^{T} ; y_{t}^{T} ;\left(1-\tilde{m}_{t}^{T}\right)\right]^{T}} \\ \left.\left[\tilde{x}_{t+1}^{T} ; y_{t+1}^{T} ;\left(1-\tilde{m}_{t+1}\right)\right]^{T}\right] \end{gathered}\).
-
-
4) gating matrix \(\Lambda\) 만든 뒤,
mix the “generator output” & “raw data” by gating value
\(S=Y \odot \Lambda+\tilde{X} \odot(1-\Lambda)\).