
Learning Fast and Slow for Online TS Forecasting
Contents
- Abstract
- Introduction
- Preliminary & Related Work
- TS Settings
- Online TS Forecasting
- Continual Learning
- Proposed Framework
- Online TS Forecasting as a Continual Learning Problem
- FSNet ( Fast and Slow Learning Networks )
0. Abstract
Data arrives sequentially.
Training deep neural forecasters on the fly is notoriously challenging
- limited ability to adapt to non-stationary environments
- fast adaptation capability of DNN is critica
Fast and Slow learning Network (FSNet)
- inspired by Complementary Learning Systems (CLS) theory
- address the challenges of online forecasting.
- improves the slowly-learned backbone
- by dynamically balancing fast adaptation to recent changes and retrieving similar old knowledge.
- via an interaction between two novel complementary components:
- (i) a per-layer adapter
- to support fast learning from individual layers
- (ii) an associative memory
- to support remembering, updating, and recalling repeating events
- (i) a per-layer adapter
1. Introduction
Batch learning setting
- whole training dataset to be made available a priori
- implies the relationship between the input and outputs remains static
Desirable to train the deep forecaster “online” (Anava et al., 2013; Liu et al., 2016)
-
using only new samples to capture the changing dynamic of the environment.
-
remains challenging for 2 reasons.
-
(1) Naively train DNNs on data streams REQUIRES MANY SAMPLES to converge
- offline training benefits ( = such as mini-batches or training for multiple epochs ) are not available.
- when a distribution shift happens, such models would require many samples
\(\rightarrow\) DNN lack a mechanism to facilitate successful learning on data streams.
-
(2) TS often exhibit RECURRENT patterns
- one pattern could become inactive and re-emerge in the future.
- catastrophic forgetting : cannot retain prior knowledge
-
\(\rightarrow\) Consequently, online TS forecasting with deep models presents a promising yet challenging problem.
This paper
-
formulate online TS forecasting as an online, task-free continual learning problem
-
continual learning requires balancing two objectives:
- (1) utilizing past knowledge to facilitate fast learning of current patterns
- (2) maintaining and updating the already acquired knowledge
( = stability-plasticity dilemma )
\(\rightarrow\) develop an effective Online TS forecasting framework
- motivated by the Complementary Learning Systems (CLS)
FSNet (Fast-and-Slow learning Network)
to enhance the sample efficiency of DNN when dealing with distribution shifts or recurring concepts in online TS forecasting.
Key idea for Fast Learning
-
always improve the learning at current steps
( = instead of explicitly detecting changes in the environment )
-
employs a perlayer adapter to model the temporal consistency in TS & adjust each intermediate layer to learn better
For recurring patterns..
- equip each adapter with an associative memory
- When encountering such events, the adapter interacts with its memory to retrieve and update the previous actions to further facilitate fast learning.
Contributions
- (1) Radically formulate learning fast in online TS forecasting as a continual learning problem
- (2) Propose a fast-and-slow learning paradigm of FSNet
- to handle both the fast changing and long-term knowledge in TS
- (3) Extensive experiments
- with both real and synthetic datasets
2. Preliminary & Related Work
(1) TS settings
Notation
- \(\mathcal{X}=\left(\boldsymbol{x}_1, \ldots, \boldsymbol{x}_T\right) \in \mathbb{R}^{T \times n}\) : a time series of \(T\) observations, each has \(n\) dimensions.
- Input : \(\mathcal{X}_{i, e}=\) \(\left(\boldsymbol{x}_{i-e+1}, \ldots, \boldsymbol{x}_i\right)\),
- Predict : \(f_\omega\left(\mathcal{X}_{i, H}\right)=\left(\boldsymbol{x}_{i+1}, \ldots, \boldsymbol{x}_{i+H}\right)\),
(2) Online Time Series Forecasting
Sequential nature of data
No separation of training and evaluation
- Instead, learning occurs over a sequence of rounds.
- At each round, the model receives a look-back window and predicts the forecast window.
- Then, the true answer is revealed to improve the model’s predictions of the incoming rounds
- evaluation : accumulated errors throughout learning
Challenging sub-problems
- learning under concept drifts
- dealing with missing values because of the irregularly-sampled data
\(\rightarrow\) focus on the problem of fast learning (in terms of sample efficiency) under concept drifts
Bayesian continual learning
- to address regression problems
- However, such formulation follow the Bayesian framework, which allows for forgetting of past knowledge and does not have an explicit mechanism for fast learning
- did not focus on DNNs
(3) Continual Learning
Learn a series of tasks sequentially
( with only limited access to past experiences )
Continual learner : must achieve a good trade-off between …
- (1) maintaining the acquired knowledge of previous tasks
- (2) facilitating the learning of future tasks
Continual learning methods inspired from the CLS theory
- augments the slow, deep networks with the ability to quickly learn on data streams, either via
- (1) Experience replay mechanism
- (2) Explicit modeling of each of the fast and slow learning components
3. Proposed Framework
Formulates the “online TS forecasting” as a “task-free online continual learning problem”
Proposed FSNet framework.
(1) Online TS Forecasting as a Continual Learnring Problem
Locally stationary stochastic processes observation
-
TS can be split into a sequence of stationary segments
( = Same underlying process generates samples from a stationary segment )
- Forecasting each stationary segment = Learning task for continual learning.
- ex) split into 1 segment = no concept drifts = online learning in stationary environments
- ex) split into more than 2 segment = Online Continual Learning
- Do not assume that the points of task switch are given!
Online, task-free continual learning formulation
Differences between our formulation vs existing studies?
a) Difference 1
- (1) Most existing task-free continual learning frameworks = IMAGE data
- input and label spaces of images are different (continuous vs discrete)
- image’s label changes significantly across tasks
- (2) Ours = TS data
- input and output share the same real-valued space.
- data changes gradually over time with no clear boundary.
- exhibits strong temporal information among consecutive samples,
\(\rightarrow\) Simply apply existing continual learning methods to TS … BAD!
b) Difference 2
TS evolves and old patterns may not reappear exactly
\(\rightarrow\) not interested in remembering old patterns precisely, but predicting how they will evolve
\(\rightarrow\) do not need a separate test set for evaluation
( but training follows the online learning setting where a model is evaluated by its accumulated errors throughout learning )
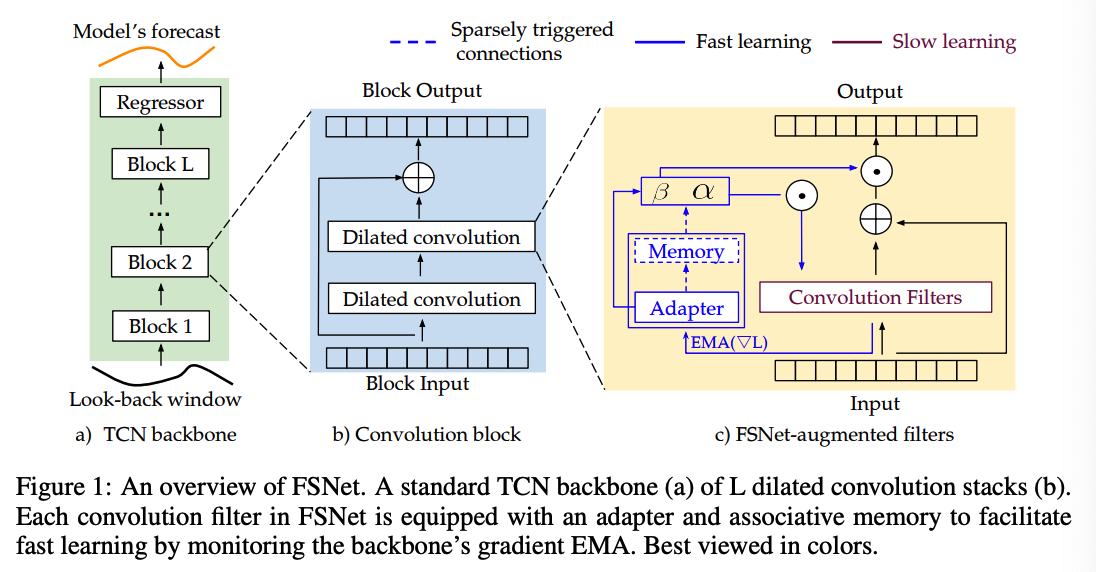
(2) FSNet ( Fast And Slow Learning Networks )
Details
-
leverages past knowledge to improve the learning in the future
( = facilitating forward transfer in continual learning )
-
remembers repeating events and continue to learn them when they reapp
( = preventing catastrophic forgetting )
Backbone : Temporal Convolutional Network (TCN)
- \(L\) layer with parameters \(\boldsymbol{\theta}=\left\{\boldsymbol{\theta}_l\right\}_{l=1}^L\).
Improves the TCN with 2 complementary components:
- (1) per-layer adapter \(\phi_l\)
- (2) per-layer associative memory \(\mathcal{M}_l\).
Parameters & Memories
- Total trainable parameters : \(\boldsymbol{\omega}=\left\{\boldsymbol{\theta}_l, \boldsymbol{\phi}_l\right\}_{l=1}^L\)
- Total associative memory : \(\mathcal{M}=\left\{\mathcal{M}_l\right\}_{l=1}^L\)
Notation
- \(\boldsymbol{h}_l\) : original feature map of the \(l\)-layer
- \(\tilde{\boldsymbol{h}}_l\) : adapter feature map of the \(l\)-layer
a) Fast Learning Mechanism
Key observation allowing for a fast learning?
\(\rightarrow\) facilitate the learning of each intermediate layer
Gradient EMA
\(\nabla_{\boldsymbol{\theta}_l} \ell\) : contribution of layer \(\boldsymbol{\theta}_l\) to the forecasting loss \(\ell\).
-
(traditional method) move the parameters along this gradient direction
\(\rightarrow\) results in ineffective online learning
-
TS exhibits strong temporal consistency across consecutive samples
\(\rightarrow\) EMA of \(\nabla_{\boldsymbol{\theta}_l} \ell\) can provide meaningful information about the temporal smoothness in TS
To utilize the gradient EMA …
-
treat it as a context to support fast learning, via the feature-wise transformation framework
-
propose to equip each layer with an adapter to map the layer’s gradient EMA to a set of smaller, more compact transformation coefficients.
-
EMA of the \(l\)-layer’s partial derivative
= \(\hat{\boldsymbol{g}}_l \leftarrow \gamma \hat{\boldsymbol{g}}_l+(1-\gamma) \boldsymbol{g}_l^t\).
- \(\boldsymbol{g}_l^t\) : the gradient of the \(l\)-th layer at time \(t\)
- \(\hat{\boldsymbol{g}}_l\) : the EMA.
-
Adapter ( = linear layer )
- Input : \(\hat{\boldsymbol{g}}_l\)
- Output : Adaptation coefficients, \(\boldsymbol{u}_l=\left[\boldsymbol{\alpha}_l ; \boldsymbol{\beta}_l\right]\)
-
Two-stage transformations
- weight and bias transformation coefficients \(\boldsymbol{\alpha}_l\)
- feature transformation coefficients \(\boldsymbol{\beta}_l\).
Adaptation process ( for layer \(\boldsymbol{\theta}_l\) )
-
\(\left[\boldsymbol{\alpha}_l, \boldsymbol{\beta}_l\right]=\boldsymbol{u}_l, \text { where } \boldsymbol{u}_l=\boldsymbol{\Omega}\left(\hat{\boldsymbol{g}}_l ; \boldsymbol{\phi}_l\right)\).
-
Weight adaptation: \(\tilde{\boldsymbol{\theta}}_l=\operatorname{tile}\left(\boldsymbol{\alpha}_l\right) \odot \boldsymbol{\theta}_l\)
-
Feature adaptation: \(\tilde{\boldsymbol{h}}_l=\operatorname{tile}\left(\boldsymbol{\beta}_l\right) \odot \boldsymbol{h}_l\), where \(\boldsymbol{h}_l=\tilde{\boldsymbol{\theta}}_l \circledast \tilde{\boldsymbol{h}}_{l-1}\).
-
tile \(\left(\boldsymbol{\alpha}_l\right)\) : weight adaptor is applied per-channel on all filters via a tile function
( = repeats a vector along the new axes )
-
b) Remembering Recurrring Events with an Associative Memory
Old patterns may reappear
Adaptation to a pattern is represented by the coefficients \(\boldsymbol{u}\),
-
useful to learn repeating events
-
represents how we adapted to a particular pattern in the past
\(\rightarrow\) storing and retrieving the appropriate \(\boldsymbol{u}\) may facilitate learning the corresponding pattern when they reappear.
Associative memoy
- to store the adaptation coefficients of repeating events encountered during learning
- beside the adapter, equip each layer with an additional associative memory \(\mathcal{M}_l \in \mathbb{R}^{N \times d}\)
- \(d\) : the dimension of \(\boldsymbol{u}_l\)
- \(N\) : the number of elements ( fix as \(N=32\) by default.)
**Sparse Adapter-Memory Interactions **
-
Interacting with the memory at every step is expensive
\(\rightarrow\) Propose to trigger this interaction subject to a “substantial” representation change.
-
Interference between the current & past representations
= dot product between the gradients
-
Deploy another gradient EMA \(\hat{\boldsymbol{g}}_l^{\prime}\) with a smaller coefficient \(\gamma^{\prime}<\gamma\)
& Measure their cosine similarity to trigger the memory interaction as:
- \(\text { Trigger if }: \cos \left(\hat{\boldsymbol{g}}_l, \hat{\boldsymbol{g}}_l^{\prime}\right)=\frac{\hat{\boldsymbol{g}}_l \cdot \hat{\boldsymbol{g}}_l^{\prime}}{ \mid \mid \hat{\boldsymbol{g}}_l \mid \mid \mid \mid \hat{\boldsymbol{g}}_l \mid \mid }<-\tau\).
-
set \(\tau\) to a relatively high value
= memory only remembers significant changing patterns
Adapter-Memory Interacting Mechanism
- perform the memory read and write operations using the adaptation coefficients’s EMA
- EMA of \(\boldsymbol{u}_l\) is calculated in the same manner as Equation 1.
If a memory interaction is triggered…
\(\rightarrow\) Adapter queries and retrieves the most similar transformations in the past via an attention read operation
( = which is a weighted sum over the memory items )
- Attention calculation: \(\boldsymbol{r}_l=\operatorname{softmax}\left(\mathcal{M}_l \hat{\boldsymbol{u}}_l\right)\);
- Top-k selection: \(\boldsymbol{r}_l^{(k)}=\operatorname{TopK}\left(\boldsymbol{r}_l\right)\);
- Retrieval: \(\tilde{\boldsymbol{u}}_l=\sum_{i=1}^K \boldsymbol{r}_l^{(k)}[i] \mathcal{M}_l[i]\),
- \(\boldsymbol{r}^{(k)}[i]\) : the \(i\)-th element of \(\boldsymbol{r}_l^{(k)}\)
- \(\mathcal{M}_l[i]\) : the \(i\)-th row of \(\mathcal{M}_l\).