Transformer-Modulated Diffusion Models for Probabilistic MTS Forecasting
Contents
- Abstract
- Introduction
- Diffusion model in TS
- TMDM
- Learning Transformer powered conditions
- Conditional Diffusion-based TS Generative Model
Abstract
Transformer: neglect uncertainty in predicted TS
TMDM (Transformer-Modulated Diffusion Model)
- Harness the power of transformer
- Utilize the information from transformer as prior
- Capture covariate-dependence in both forward & reverse
- Introduce 2 novel metrics for uncertainty estimation
1. Introduction
Uncertainty estimation
= capture the uncertainty of \(\boldsymbol{y}_{0: M}\) given \(\boldsymbol{x}_{0: N}\).
Transformer-Modulated Diffusion Model (TMDM)
Unifies the conditional diffusion generative process with transformers
Primary objective:
- Recover the full distn of future TS \(\boldsymbol{y}_{0: M}\),
- Conditioned on the representation captured by existing transformer-based method
2. Diffusion model in TS
Conditional embedding is fed into the denoising network
- TimeGrad: hidden state from RNN
- TimeDiff: embedding based on two features explicitly designed for TS
- TMDM: employs conditional information as a prior knowledge for both forward & reverse process
Contributions
- TMDM, a transformer-based diffusion generative framework
- Integrates diffusion & transformer-based models within a cohesive Bayesian framework
- Explore the application of PICP & QICE as metrics in probabilistic MTS forecasting for uncertainty estimation
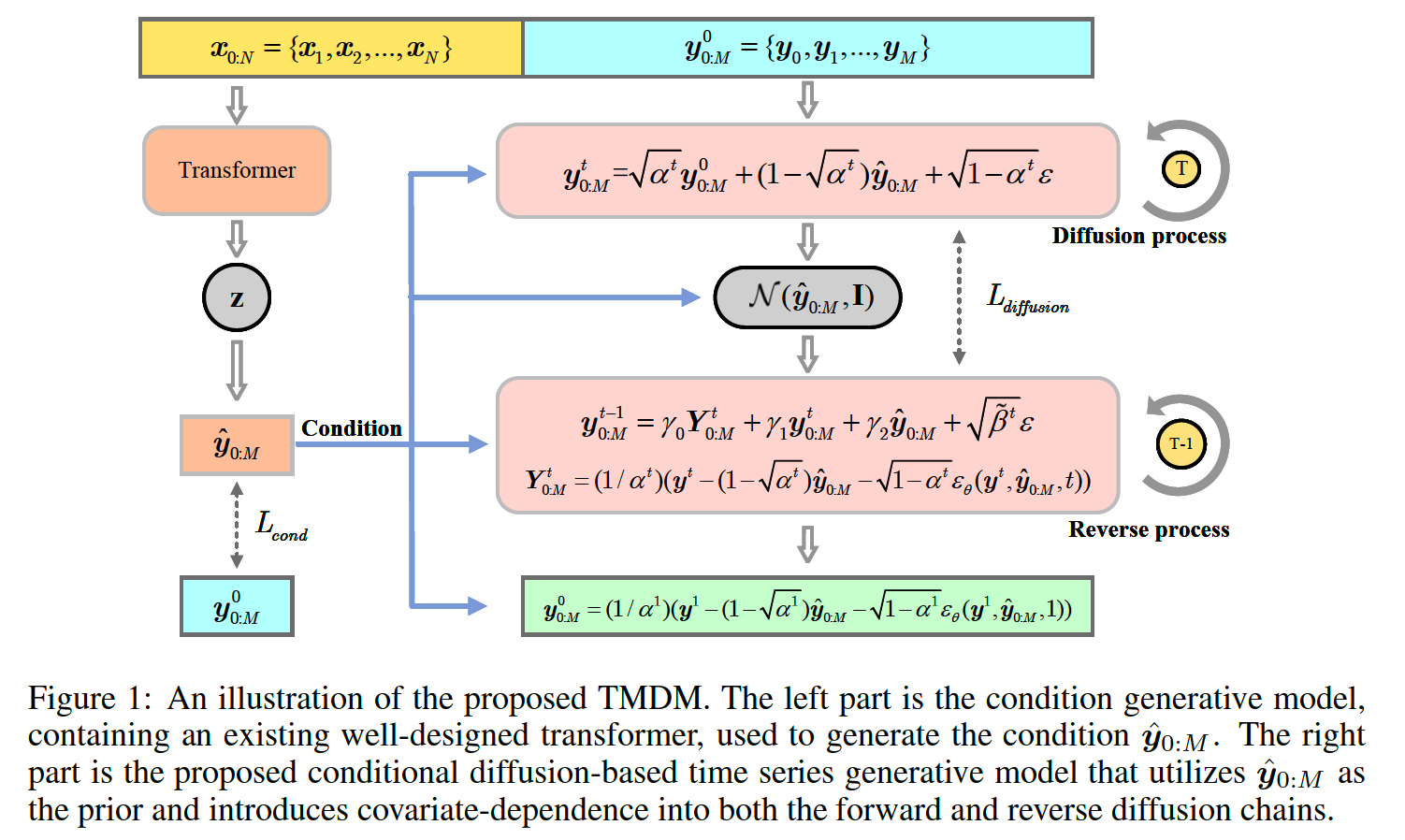
3. TMDM
Transformer models
- excel at accurately estimating the conditional mean \(\left.\mathbb{E} \mid \boldsymbol{y}_{0: M} \mid \boldsymbol{x}_{0: N}\right]\)
TMDM
- extends this capability to recover the full distribution of the future time series \(\boldsymbol{y}_{0: M}\).
2 main components
- Transformer-powered conditional distribution learning model (condition generative model)
- Conditional diffusion-based time series generative model
\(\rightarrow\) Integrated into a unified Bayesian framework, leveraging a hybrid optimization approach
\(p\left(\boldsymbol{y}_{0: M}^0\right)=\int_{\boldsymbol{y}_{0: M}^{1: T}} \int_{\boldsymbol{z}} p\left(\boldsymbol{y}_{0: M}^T \mid \hat{\boldsymbol{y}}_{0: M}\right) \prod_{t=1}^T p\left(\boldsymbol{y}_{0: M}^{t-1} \mid \boldsymbol{y}_{0: M}^t, \hat{\boldsymbol{y}}_{0: M}\right) p\left(\hat{\boldsymbol{y}}_{0: M} \mid \boldsymbol{z}\right) p(\boldsymbol{z}) d \boldsymbol{z} d \boldsymbol{y}_{0: M}^{1: T}\).
- historical time series \(\boldsymbol{x}_{0: M}\)
- model a latent variable \(\boldsymbol{z}\) using transformer
- generates a conditional representation \(\hat{\boldsymbol{y}}_{0: M}\) with \(\boldsymbol{z}\)
- \(\rightarrow\) us this as a condition for forward and reverse processes
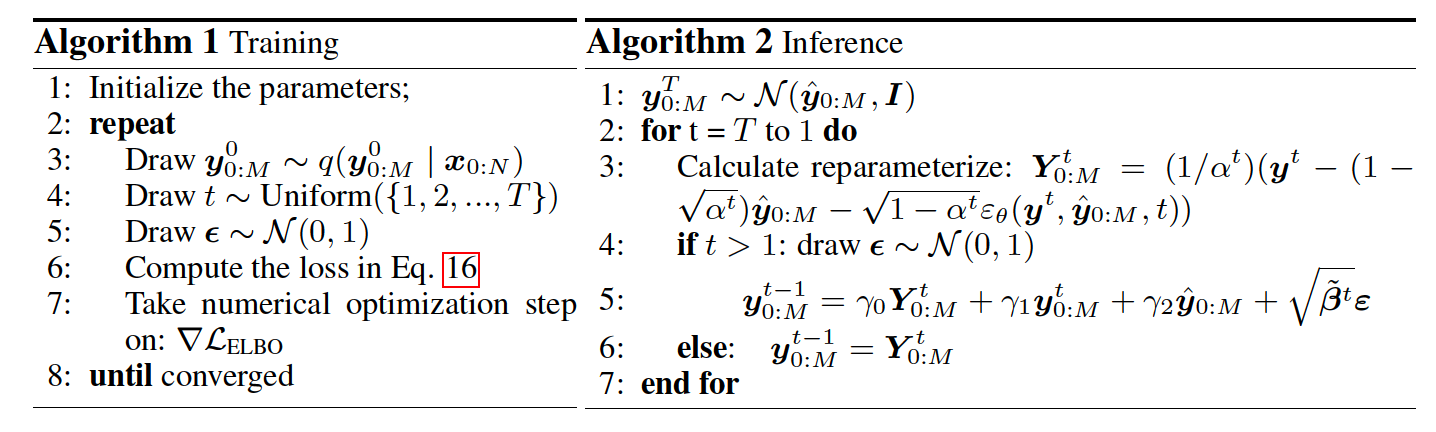
(1) Learning Transformer powered conditions
\(q\left(\boldsymbol{z} \mid \mathscr{T}\left(\boldsymbol{x}_{0: N}\right)\right) \sim \mathcal{N}\left(\tilde{\boldsymbol{\mu}}_z\left(\mathscr{T}\left(\boldsymbol{x}_{0: N}\right)\right), \tilde{\boldsymbol{\sigma}}_z\left(\mathscr{T}\left(\boldsymbol{x}_{0: N}\right)\right)\right)\).
- Transformer structure \(\mathscr{T}(\cdot)\)
- Historical time series \(\boldsymbol{x}_{0: N}\)
\(\rightarrow\) Capture the representation by \(\mathscr{T}\left(\boldsymbol{x}_{0: N}\right)\).
\(\rightarrow\) Serves as the guiding factor for approximating the true posterior distribution of \(z\).
Given a well-learned \(\boldsymbol{z}\) ….. generate the conditional representation \(\hat{\boldsymbol{y}}_{0: M}\) :
\(\boldsymbol{z} \sim \mathcal{N}(0,1) \quad \text { and } \quad \hat{\boldsymbol{y}}_{0: M} \sim \mathcal{N}\left(\boldsymbol{\mu}_z(\boldsymbol{z}), \boldsymbol{\sigma}_z\right)\).
\(\rightarrow\) Used in forward and reverse processes in TMDM.
(2) Conditional Diffusion-based TS Generative Model
Incorporate the conditional representation \(\hat{\boldsymbol{y}}_{0: M}\) into \(p\left(\boldsymbol{y}_{0: M}^T\right)\)
- can be viewed as prior knowledge for estimating the conditional mean \(\mathbb{E}\left[\boldsymbol{y}_{0: M} \mid \boldsymbol{x}_{0: N}\right]\)
a) Forward
Conditional distributions for the forward process
- \(q\left(\boldsymbol{y}_{0: M}^t \mid \boldsymbol{y}_{0: M}^{t-1}, \hat{\boldsymbol{y}}_{0: M}\right) \sim \mathcal{N}\left(\boldsymbol{y}_{0: M}^t \mid \sqrt{1-\beta^t} \boldsymbol{y}_{0: M}^{t-1}+\left(1-\sqrt{1-\beta^t}\right) \hat{\boldsymbol{y}}_{0: M}, \beta^t \boldsymbol{I}\right)\).
b) Backward
- \(q\left(\boldsymbol{y}_{0: M}^{t-1} \mid \boldsymbol{y}_{0: M}^0, \boldsymbol{y}_{0: M}^t, \hat{\boldsymbol{y}}_{0: M}\right) \sim \mathcal{N}\left(\boldsymbol{y}_{0: M}^{t-1} \mid \gamma_0 \boldsymbol{y}_{0: M}^0+\gamma_1 \boldsymbol{y}_{0: M}^t+\gamma_2 \hat{\boldsymbol{y}}_{0: M}, \tilde{\beta}^t \boldsymbol{I}\right)\).
- \(\gamma_0=\frac{\beta^t \sqrt{\alpha^{t-1}}}{1-\alpha^t}, \gamma_1=\frac{\left(1-\alpha^{t-1}\right) \sqrt{\bar{\alpha}^t}}{1-\alpha^t}, \gamma_2=1+\frac{\left(\sqrt{\alpha^t}-1\right)\left(\sqrt{\bar{\alpha}^t}+\sqrt{\alpha^{t-1}}\right)}{1-\alpha^t}, \tilde{\beta}^t=\frac{\left(1-\alpha^{t-1}\right)}{1-\alpha^t} \beta^t\).