
( 참고 : 패스트 캠퍼스 , 한번에 끝내는 컴퓨터비전 초격차 패키지 )
Context Understanding - Visual Transformer
Contents
- Stand-alone self-attention
- Vision Transformer (ViT)
- Visual Transformer (VT)
- DeiT
- ConViT
- CeiT
- Swin Transformer
- T2T-ViT
- PVT
- Vision Transformers with patch diversification
1. Stand-alone self-attention
( Ramachandran, Prajit, et al. “Stand-alone self-attention in vision models.” Advances in Neural Information Processing Systems 32 (2019). )
- https://arxiv.org/abs/1906.05909
(1) Stand-alone self-attention
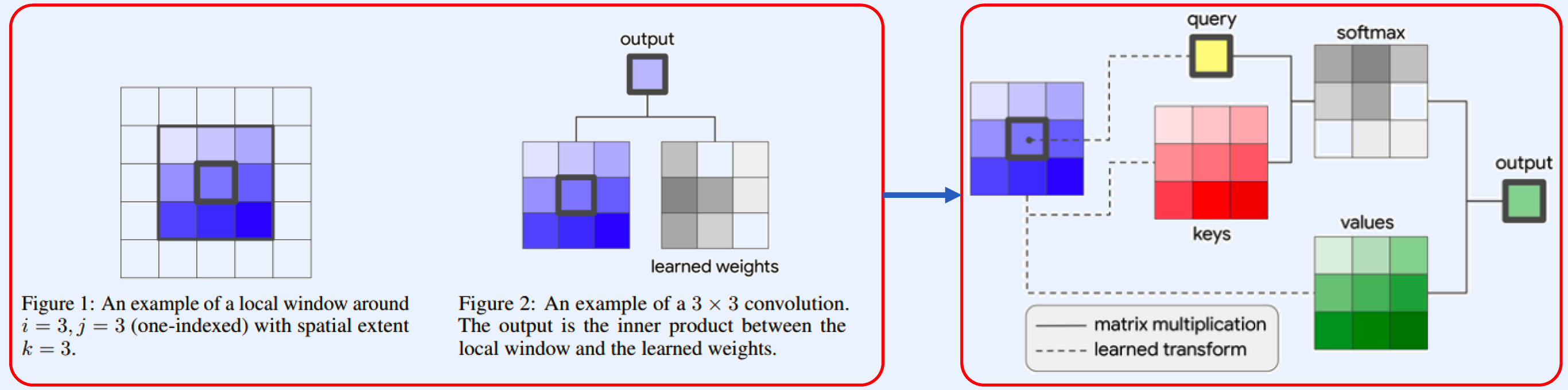
- (LEFT) standard CNN
- (RIGHT) stand-alone self-attention
\(y_{i j}=\sum_{a, b \in \mathcal{N}_{k}(i, j)} \operatorname{softmax}_{a b}\left(q_{i j}^{\top} k_{a b}\right) v_{a b}\).
- (Q) \(q_{i j}=W_{Q} x_{i j}\).
- (K) \(k_{a b}=W_{K} x_{a b}\).
- (V) \(v_{a b}=W_{V} x_{a b}\).
\(\operatorname{softmax}_{a b}\) : softmax applied to all logits computed in the neighborhood of \(i j\).
(2) Relative Distance
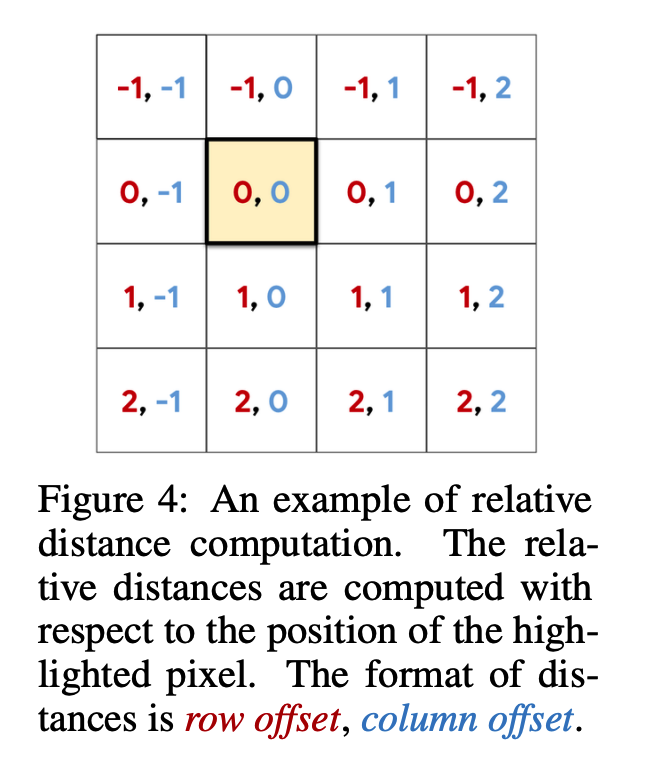
\(y_{i j}=\sum_{a, b \in \mathcal{N}_{k}(i, j)} \operatorname{softmax} \operatorname{tm}_{a b}\left(q_{i j}^{\top} k_{a b}+q_{i j}^{\top} r_{a-i, b-j}\right) v_{a b}\).
2. Vision Transformer (ViT)
( Dosovitskiy, Alexey, et al. “An image is worth 16x16 words: Transformers for image recognition at scale.” arXiv preprint arXiv:2010.11929 (2020). )
- https://arxiv.org/abs/2010.11929
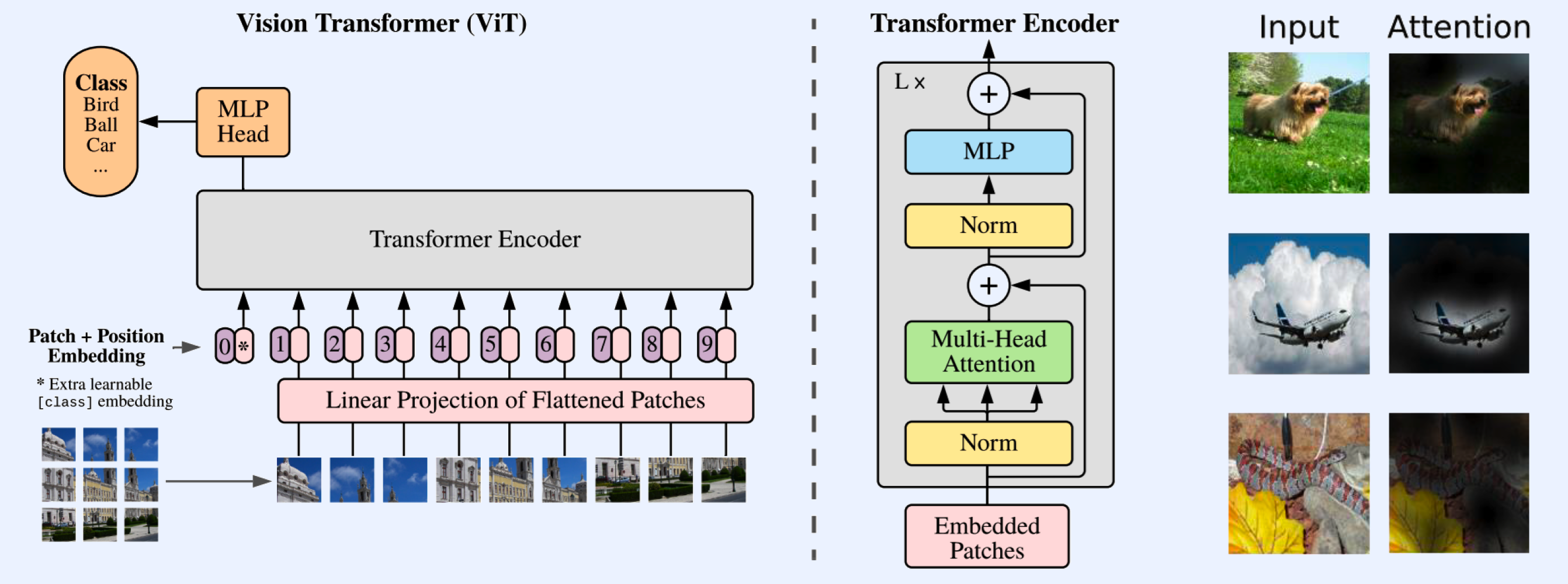
https://seunghan96.github.io/cv/vision_09_ViT/
3. Visual Transformer (VT)
( Wu, Bichen, et al. “Visual transformers: Token-based image representation and processing for computer vision.” arXiv preprint arXiv:2006.03677 (2020). )
- https://arxiv.org/pdf/2006.03677.pdf
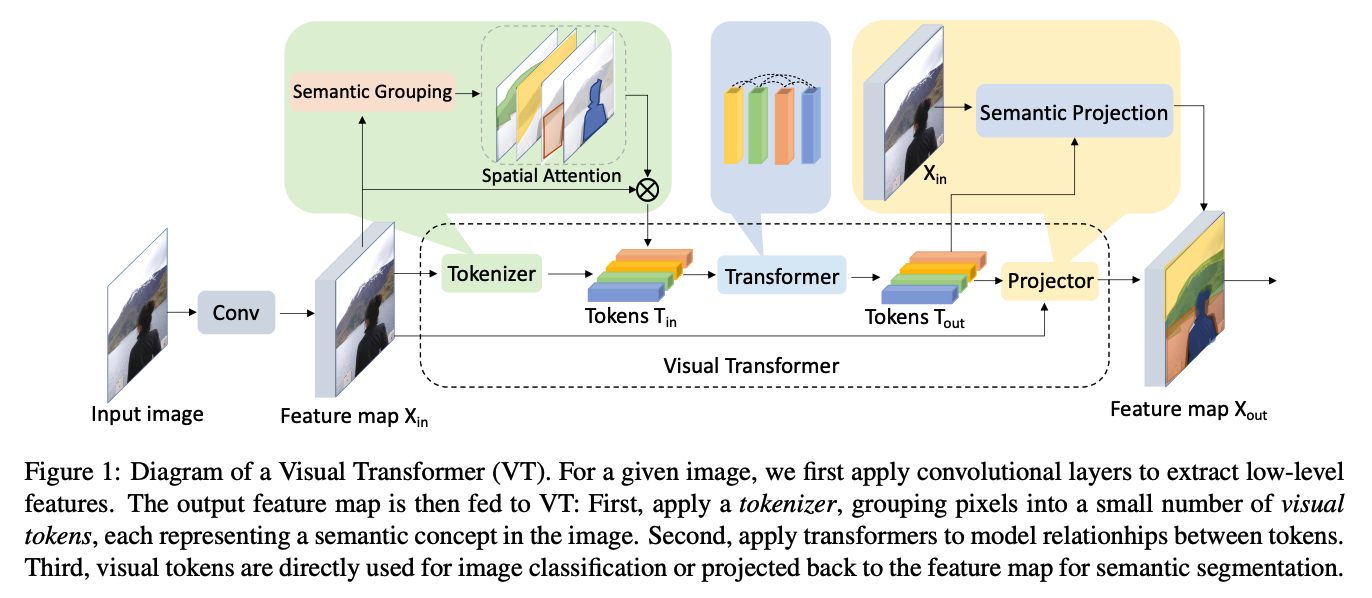
(1) Tokenizer
- (Intuition) Image = summary of words (=visual tokens)
- use tokneizer to convert
- feature maps \(\rightarrow\) compact sets of visual tokens
- ex)
- a) Filter-based Tokenizer
- b) Recurrent Tokenizer
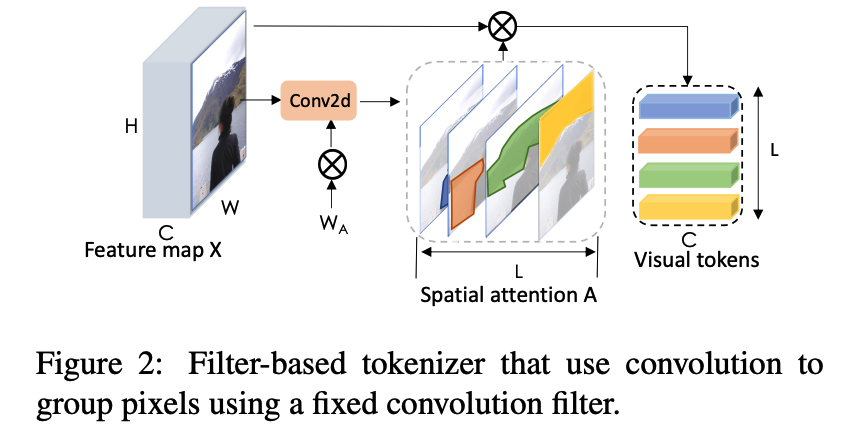
a) Filter-based Tokenizer
Notation
- feature map : \(\mathbf{X}\)
- each pixel : \(\mathbf{X}_{p} \in \mathbb{R}^{C}\)
- map each pixel to one of \(L\) semantic groups, using point-wise convolution
Wihtin each group… spatially pool pixels to obtain tokens \(\mathbf{T}\)
-
\(\mathbf{T}=\underbrace{\operatorname{softmax}_{H W}\left(\mathbf{X} \mathbf{W}_{A}\right)^{T}}_{\mathbf{A} \in \mathbb{R}^{H W \times L}} \mathbf{X}\).
- \(\mathbf{W}_{A} \in \mathbb{R}^{C \times L}\) : forms semantic groups from \(\mathbf{X}\)
-
computes weighted averages of pixels in \(\mathbf{X}\) to make \(L\) visual tokens.
( weighted average matrix : \(\mathbf{A}\) )
b) Recurrent Tokenizer
-
recurrent tokenizer with weights that are dependent on previous layer’s visual tokens
-
incrementally refine the set of visual tokens, conditioned on previously-processed concepts
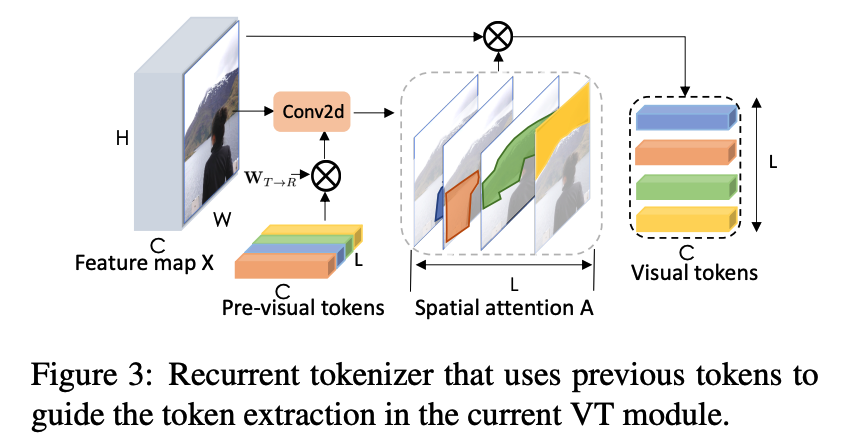
\(\mathbf{W}_{R}=\mathbf{T}_{i n} \mathbf{W}_{\mathbf{T} \rightarrow \mathbf{R}}\).
\[\mathbf{T}=\operatorname{SOFTMAX}_{H W}\left(\mathbf{X} \mathbf{W}_{R}\right)^{T} \mathbf{X}\]- where \(\mathbf{W}_{T \rightarrow R} \in \mathbb{R}^{C \times C}\)
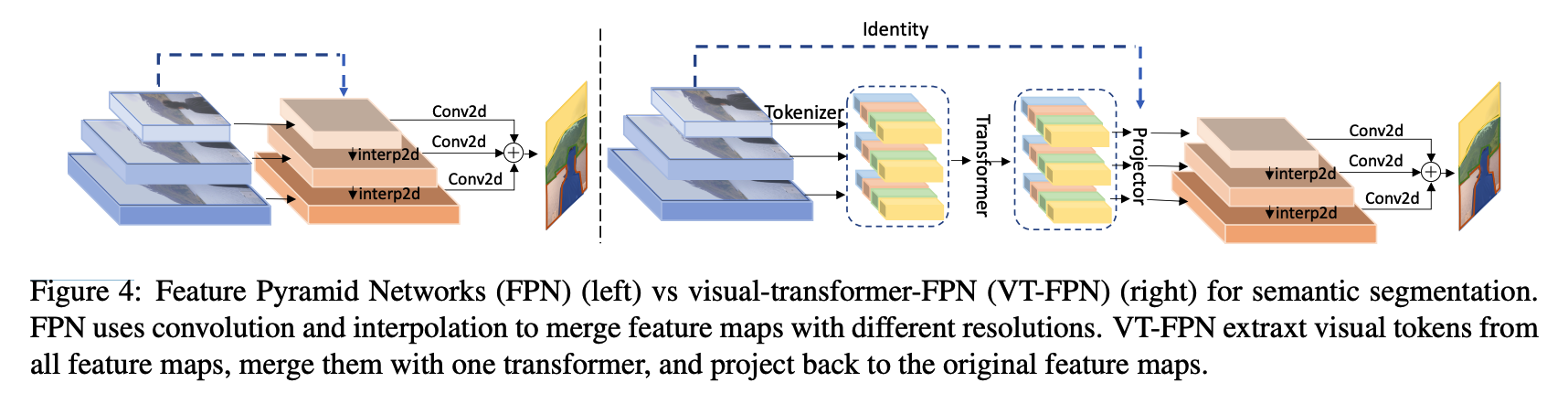
(2) Projector
Many vision tasks require pixel-level details
\(\rightarrow\) not preserved in visual tokens!
\(\rightarrow\) fuse the transformer’s output with the feature map
\(\mathbf{X}_{o u t}=\mathbf{X}_{i n}+\operatorname{SOFTMAX}_{L}\left(\left(\mathbf{X}_{i n} \mathbf{W}_{Q}\right)\left(\mathbf{T W}_{K}\right)^{T}\right) \mathbf{T}\),
(3) VT for semantic segmentation
4. DeiT
( Touvron, Hugo, et al. “Training data-efficient image transformers & distillation through attention.” International Conference on Machine Learning. PMLR, 2021. )
- https://arxiv.org/abs/2012.12877
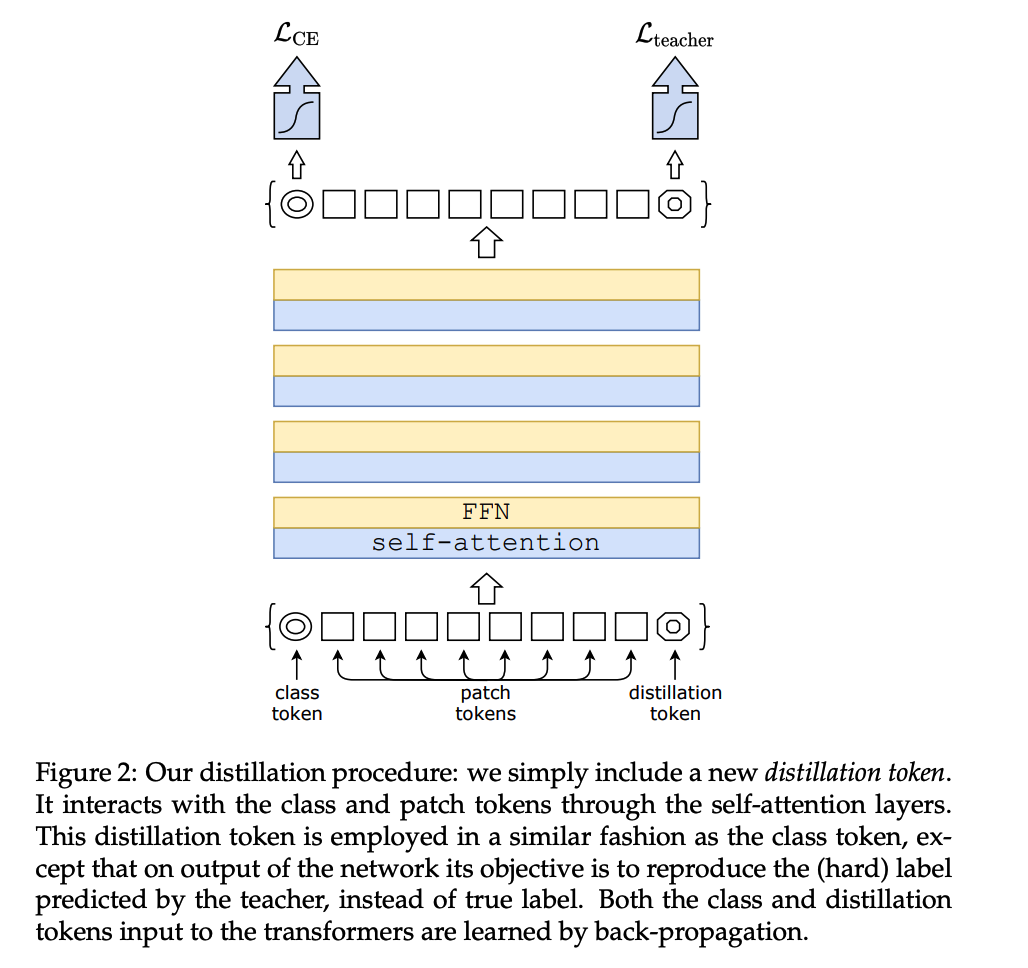
Add distillation token!
-
CNN vs Transformer
- CNN : good for locality
\(\rightarrow\) learn locality from CNN, by treating them as a teacher model
5. ConViT
( d’Ascoli, Stéphane, et al. “Convit: Improving vision transformers with soft convolutional inductive biases.” International Conference on Machine Learning. PMLR, 2021. )
- https://arxiv.org/abs/2103.10697
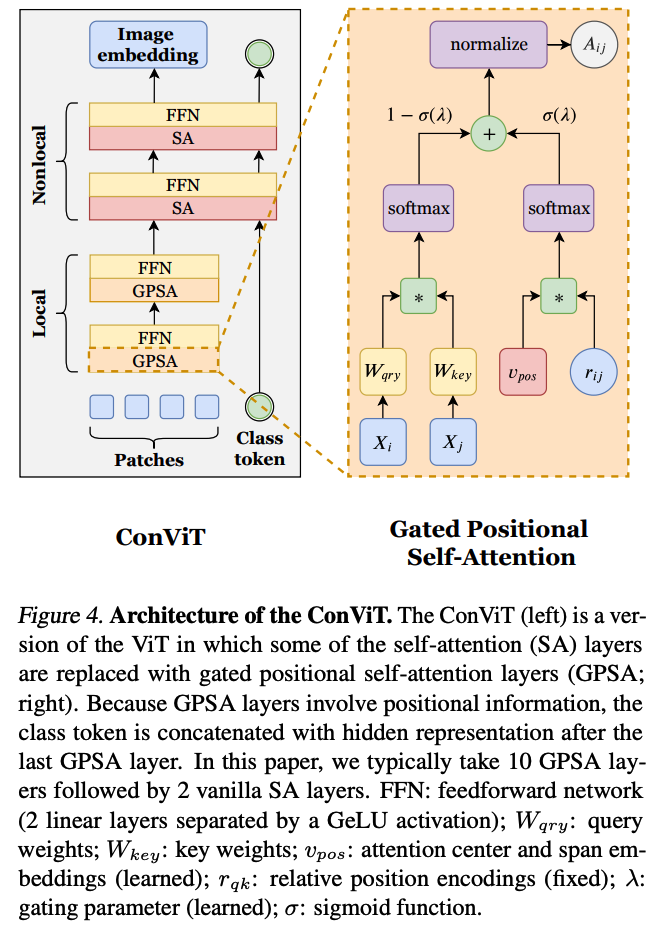
SA (Self-Attention) layer is replaced with GPSA (Gated Positional Self-Attention) layer
(1) GPSA (Gated Positional Self-Attention) layer
- contains positional information
\(\begin{aligned} \operatorname{GPSA}_{h}(\boldsymbol{X}):=& \text { normalize }\left[\boldsymbol{A}^{h}\right] \boldsymbol{X} \boldsymbol{W}_{\text {val }}^{h} \\ \boldsymbol{A}_{i j}^{h}:=&\left(1-\sigma\left(\lambda_{h}\right)\right) \operatorname{softmax}\left(\boldsymbol{Q}_{i}^{h} \boldsymbol{K}_{j}^{h \top}\right) +\sigma\left(\lambda_{h}\right) \operatorname{softmax}\left(\boldsymbol{v}_{p o s}^{h \top} \boldsymbol{r}_{i j}\right) \end{aligned}\).
6. CeiT
( Yuan, Kun, et al. “Incorporating convolution designs into visual transformers.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021. )
- https://arxiv.org/pdf/2103.11816.pdf
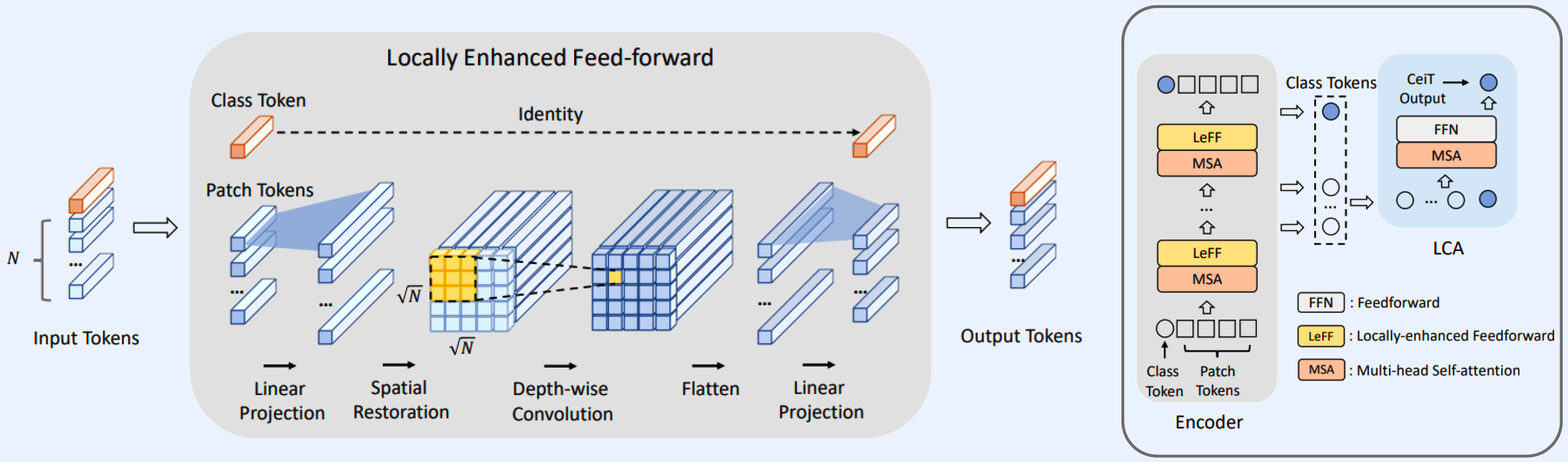
Step 1) tokenize inputs ( = patch tokens )
Step 2) project path tokens to higher dimensions
Step 3) back to original position ( keep spatial info )
Step 4) depth-wise Conv
Step 5) flatten & project to initial dimension
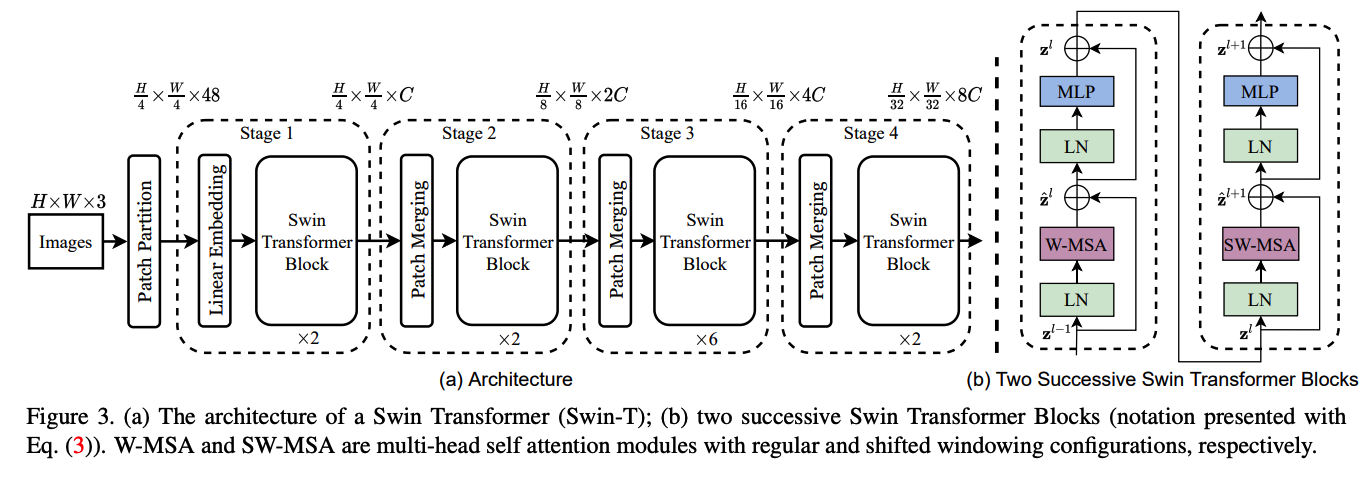
7. Swin Transformer
( Liu, Ze, et al. “Swin transformer: Hierarchical vision transformer using shifted windows.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021. )
- https://arxiv.org/abs/2103.14030
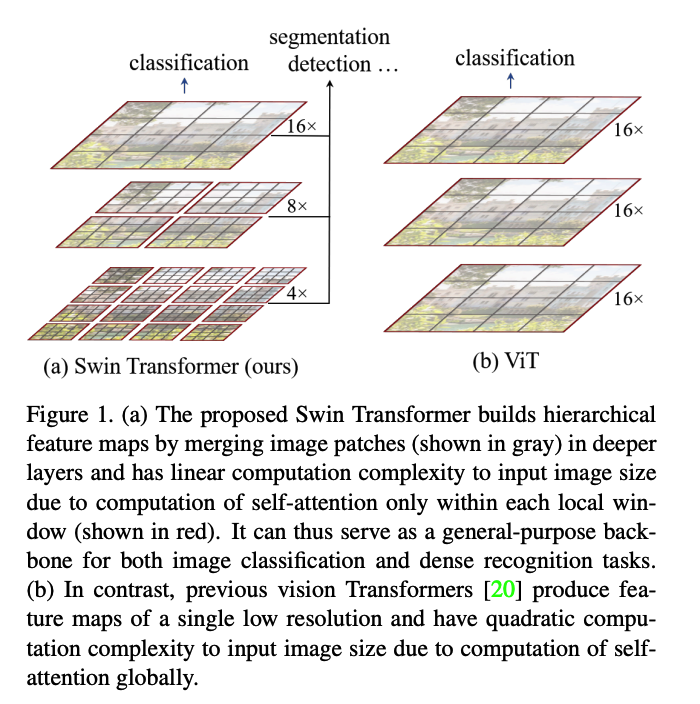
Shift the window in the next layer!
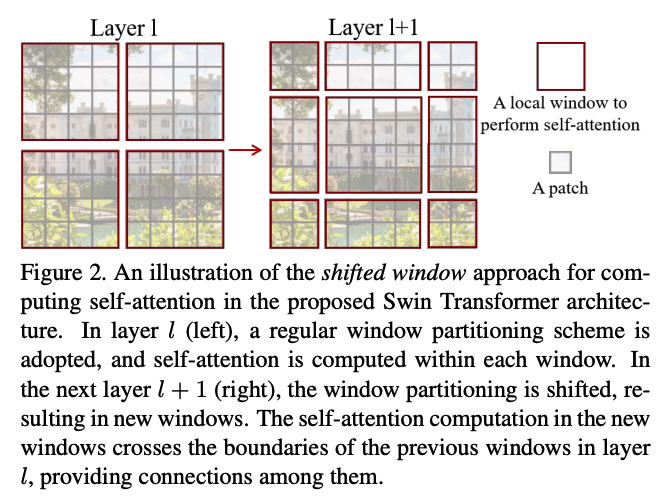
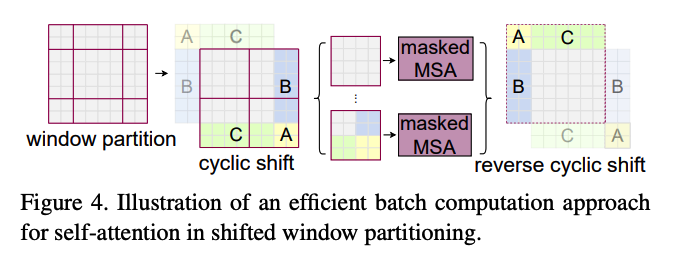
Using the Swin Transformer Block…
8. T2T-ViT
( Yuan, Li, et al. “Tokens-to-token vit: Training vision transformers from scratch on imagenet.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021. )
- https://arxiv.org/pdf/2101.11986.pdf
Tokens-to-Token ViT ( T2T-ViT )
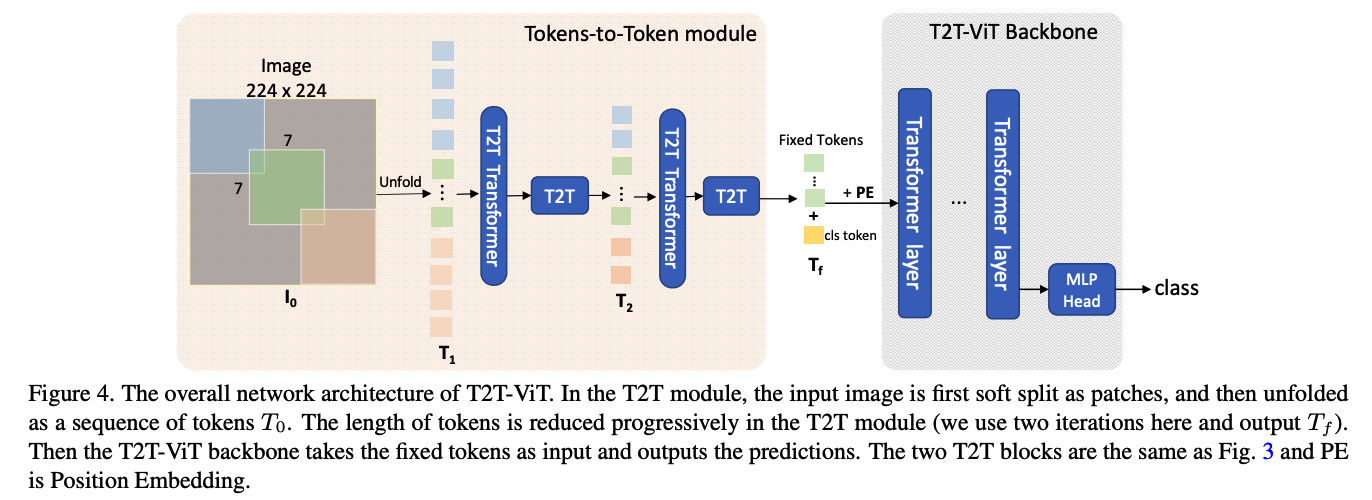
Share some tokens, when generating the next token!!
( = overlapping token )
T2T process
(1) Re-structurization
- (transformation) \(T^{\prime}=\operatorname{MLP}(\operatorname{MSA}(T))\)
- (reshape) \(I=\operatorname{Reshape}\left(T^{\prime}\right)\)
(2) Soft-Split
- length of output tokens \(T_0\) : \(l_{o}=\left\lfloor\frac{h+2 p-k}{k-s}+1\right\rfloor \times\left\lfloor\frac{w+2 p-k}{k-s}+1\right\rfloor\)
(3) T2T module
\(\begin{aligned} &T_{i}^{\prime}=\operatorname{MLP}\left(\operatorname{MSA}\left(T_{i}\right),\right. \\ &I_{i}=\operatorname{Reshape}\left(T_{i}^{\prime}\right), \\ &T_{i+1}=\operatorname{SS}\left(I_{i}\right), \quad i=1 \ldots(n-1) . \end{aligned}\).
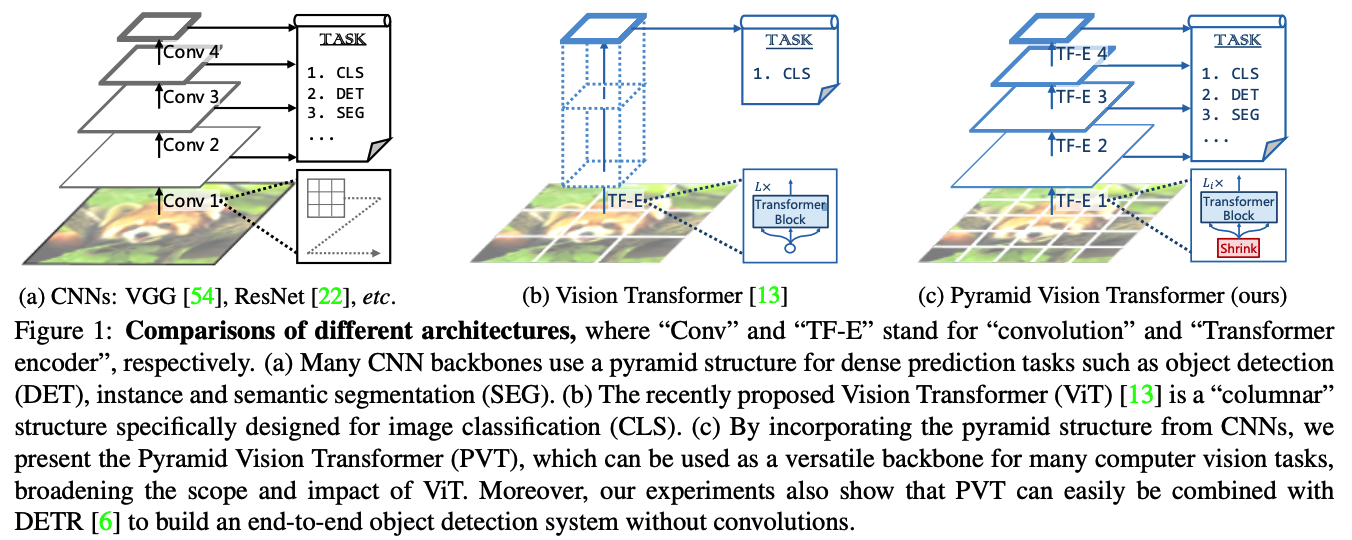
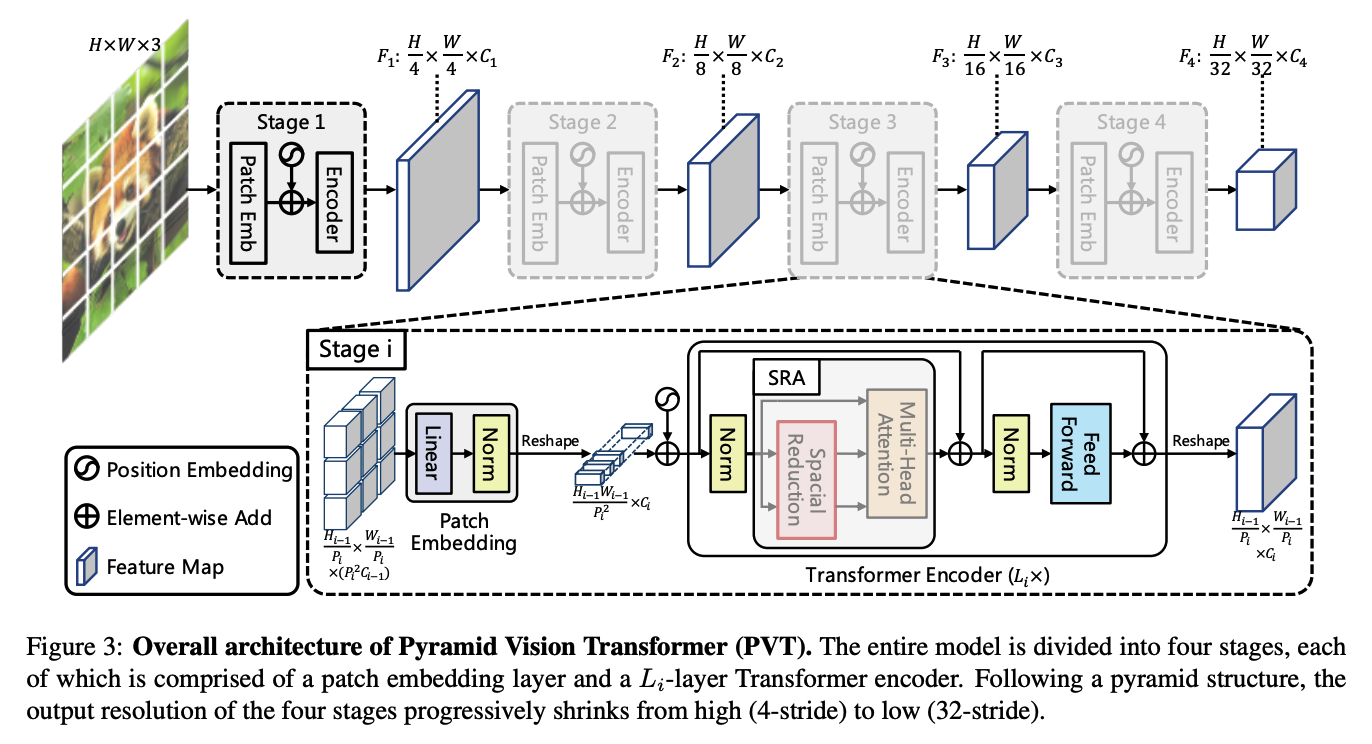
9. PVT (Pyramid Vision Transformer )
( Wang, Wenhai, et al. “Pyramid vision transformer: A versatile backbone for dense prediction without convolutions.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021. )
- https://arxiv.org/abs/2102.12122
(1) Pyramid Structure
(2) SRA (Spatial Reduction Attention)
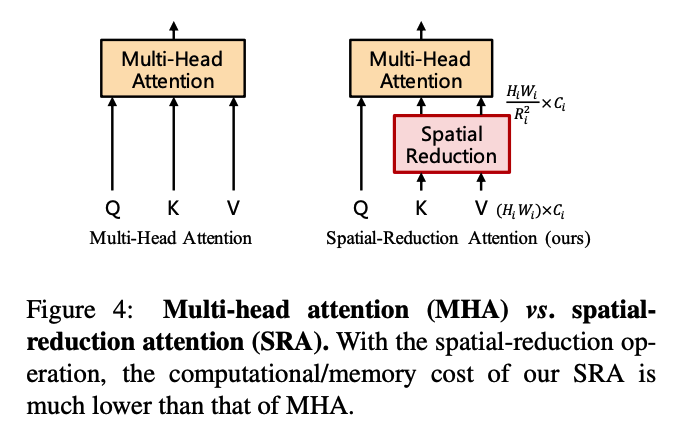
\(\operatorname{SRA}(Q, K, V)=\operatorname{Concat}\left(\operatorname{head}_{0}, \ldots, \operatorname{head}_{N_{i}}\right) W^{O}\).
- \(\operatorname{head}_{j}=\text { Attention }\left(Q W_{j}^{Q}, \mathrm{SR}(K) W_{j}^{K}, \mathrm{SR}(V) W_{j}^{V}\right)\).
- \(\operatorname{SR}(\mathbf{x})=\operatorname{Norm}\left(\operatorname{Reshape}\left(\mathbf{x}, R_{i}\right) W^{S}\right)\).
(3) Overall Structure
10. Vision Transformers with patch diversification
( Gong, Chengyue, et al. “Vision transformers with patch diversification.” arXiv preprint arXiv:2104.12753 (2021). )
- https://arxiv.org/abs/2104.12753
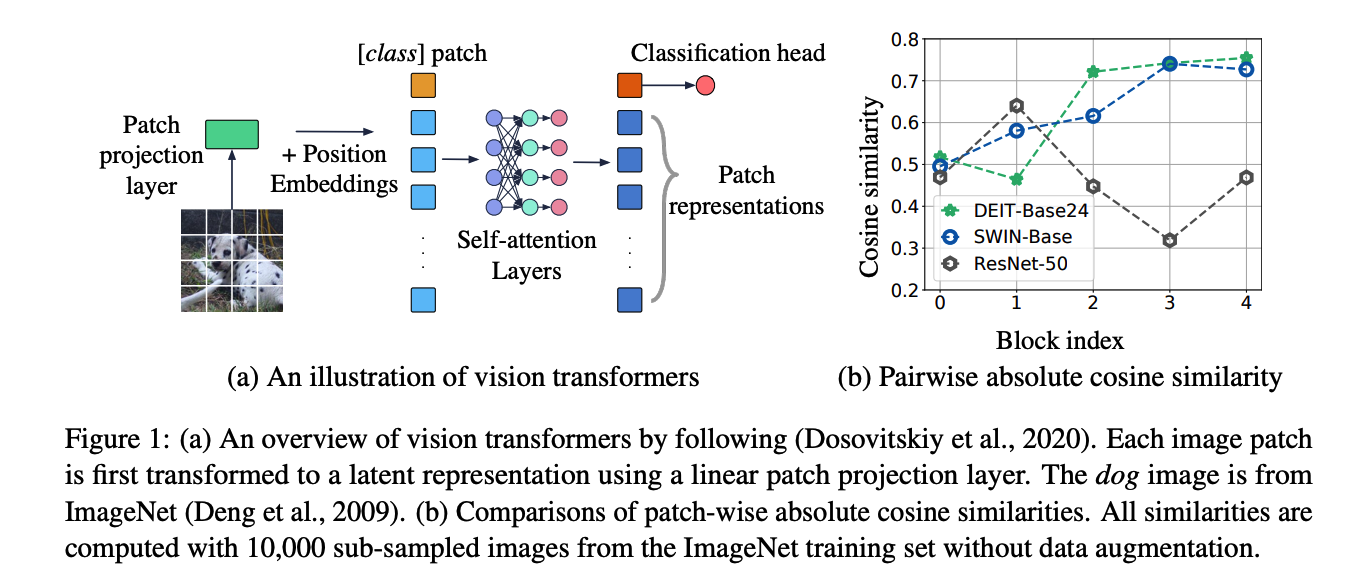
TOO DEEP layers
\(\rightarrow\) over smotthing ( not much difference between the patches ! )
( = No patch diversity :( )
- patch-wise absolute cosine similarity : \(\mathcal{P}(\boldsymbol{h})=\frac{1}{n(n-1)} \sum_{i \neq j} \frac{ \mid h_{i}^{\top} h_{j} \mid }{ \mid \mid h_{i} \mid \mid _{2} \mid \mid h_{j} \mid \mid _{2}}\).
DiversePatch
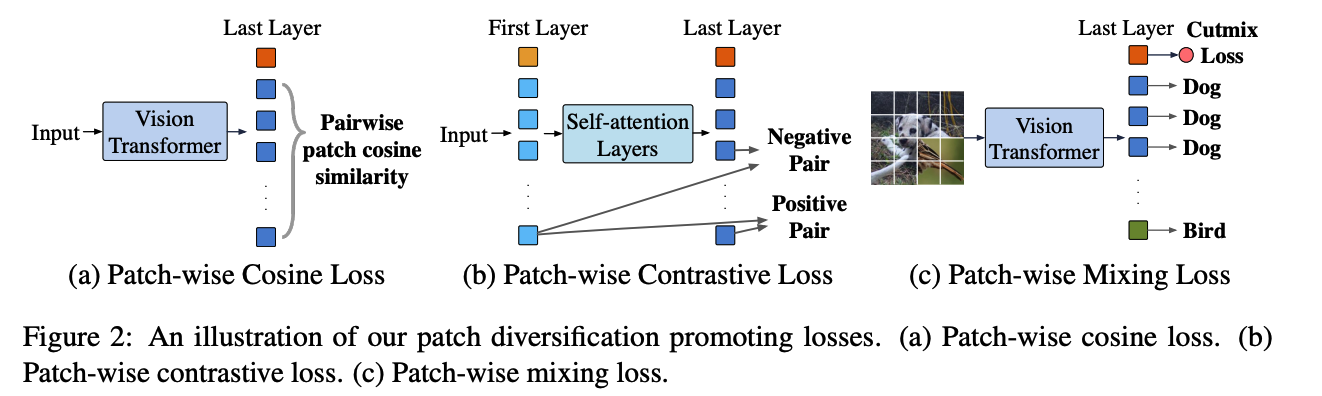
\(\rightarrow\) promote patch diversification for ViT
- (1) Patch-wise cosine loss
- \(\mathcal{L}_{\cos }(\boldsymbol{x})=\mathcal{P}\left(\boldsymbol{h}^{[L]}\right)\).
- (2) patch-wise contrastive loss
- \(\mathcal{L}_{\text {contrastive }}(\boldsymbol{x})=-\frac{1}{n} \sum_{i=1}^{n} \log \frac{\exp \left(h_{i}^{[1]^{\top}} h_{i}^{[L]}\right)}{\exp \left(h_{i}^{[1]^{\top}} h_{i}^{[L]}\right)+\exp \left(h_{i}^{[1]^{\top}}\left(\frac{1}{n-1} \sum_{j \neq i} h_{j}^{[L]}\right)\right)}\).
- (3) patch-wise mixing loss
- \(\mathcal{L}_{\text {mixing }}(\boldsymbol{x})=\frac{1}{n} \sum_{i=1}^{n} \mathcal{L}_{c e}\left(g\left(h_{i}^{[L]}\right), y_{i}\right)\).
Final Loss : weighted combination
- \(\alpha_{1} \mathcal{L}_{\text {cos }}+\alpha_{2} \mathcal{L}_{\text {contrastive }}+\alpha_{3} \mathcal{L}_{\text {mixing }}\).