CoDi: Co-evolving Contrastive Diffusion Models for Mixed-type Tabular Synthesis
Contents
-
Abstract
-
Introduction
-
Background
-
Proposed Method
- Co-evovling Conditional Diffusion Models
- Contrastive Learning
- Training & Sampling
0. Abstract
Difficulty in modeling discrete variables of tabular data
\(\rightarrow\) Propose CoDi
CoDi
- Process continuous and discrete variables separately
- but being conditioned on each other
- by two diffusion models
- Two diffusion models are co-evolved
- by reading conditions from each other
- Introduce a contrastive learning method with a negative sampling
1. Introduction
Challenging issue in the SOTA tabular data synthesis methods
\(\rightarrow\) usually consists of mixed data types
\(\rightarrow\) pre/postprocessing of the tabular data is inevitable
( & performance is highly dependent on the pre/post-processing method )
The most common way (to treat discrete variables)
= sample in “continuous spaces” after their one-hot encoding
Problems?
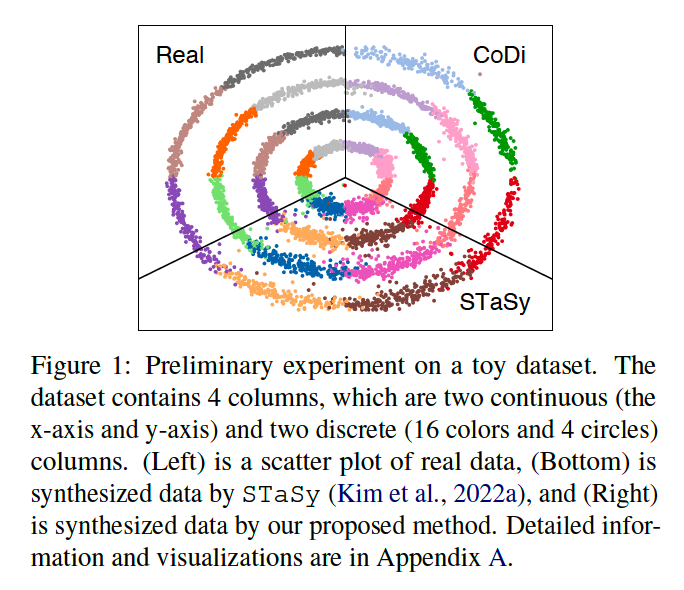
- (1) May lead to sub-optimal results due to sampling mistakes.
- (2) When continuous and discrete variables are processed in a same manner, it is likely that inter-column correlations are compromised in the learned distribution.
\(\rightarrow \therefore\) Interested in processing continuous and discrete variables in more robust ways
CoDi
- Incorporates two diffusion models
- (1) For continuous variables
- works in a continuous space
- (2) For categorical variables
- works in a discrete space
- (1) For continuous variables
- Two design points
- (1) co-evolving conditional diffusion models
- (2) contrastive training for better connecting them
Notation
- \(\mathbf{x}_0=\left(\mathbf{x}_0^C, \mathbf{x}_0^D\right)\), which consists of continuous and discrete values
- \(\mathbf{x}_t=\left(\mathbf{x}_t^C, \mathbf{x}_t^D\right)\) : diffused sample at step \(t\).
a) Co-evolving conditional diffusion models
Read conditions from each other
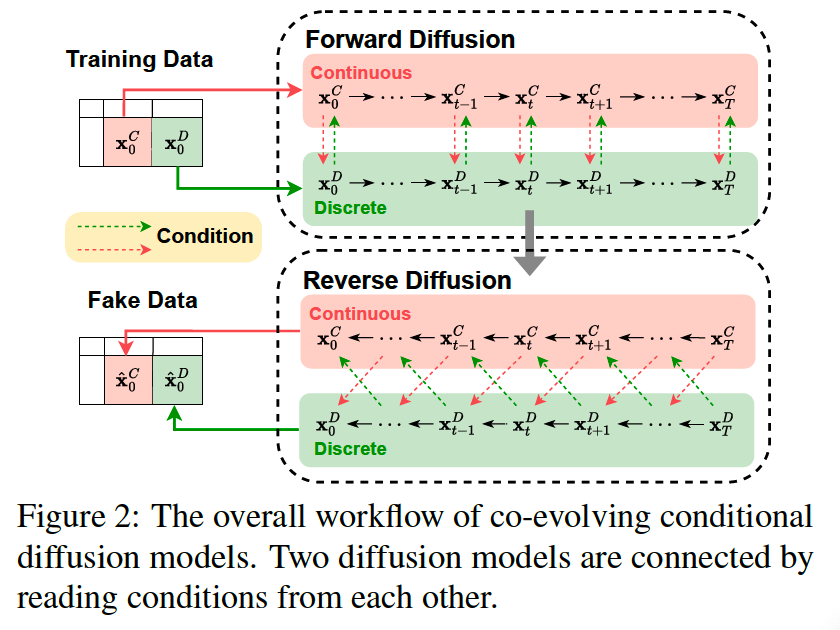
[Forward]
- Simultaneously perturb continuous and discrete variables at each forward step
- Continuous (resp. discrete) model reads the perturbed discrete (resp. continuous) sample as a condition at the same time step.
[Reverse]
- Model denoises the sample \(\mathrm{x}_t^C\) (resp. \(\mathbf{x}_t^D\) ) conditioned both on the continuous sample \(\mathbf{x}_{t+1}^C\) and discrete sample \(\mathbf{x}_{t+1}^D\) from its previous step.
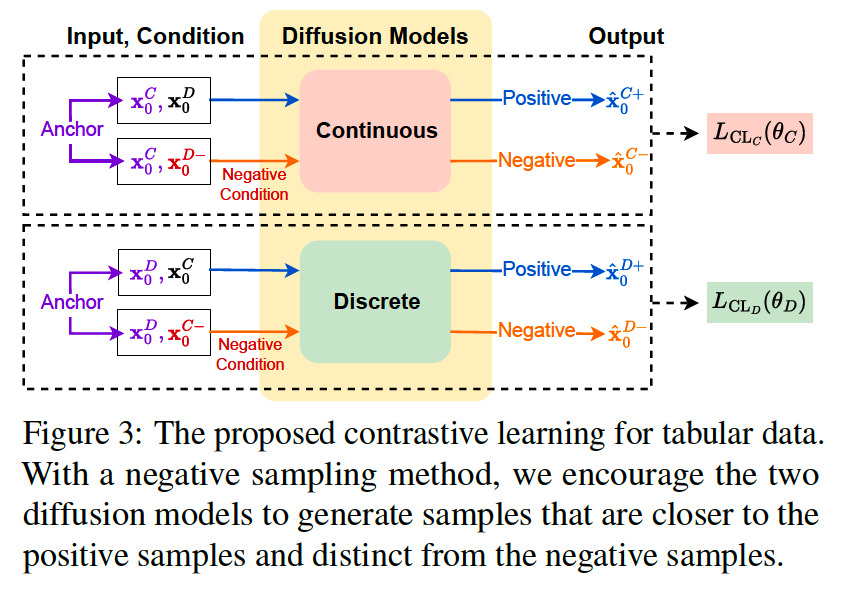
b) Contrastive learning for tabular data
-
CL : Applied to the continuous and discrete diffusion models separately
-
Negative sampling method for tabular data
- focuses on defining a negative condition that permutes the pair of continuous and discrete variable sets.
Procedures (ex. conditional diffusion model)
- From anchor sample \(\mathbf{x}_0^C\),
- [POS] Generate a continuous positive sample \(\hat{\mathbf{x}}_0^{C+}\)
- from a continuous diffusion model
- conditioned on \(\mathbf{x}_0^D\).
- [NEG] For a negative sample \(\hat{\mathbf{x}}_0^{C-}\),
- we randomly permute the condition parts
- negative condition \(\mathrm{x}_0^{D-}\) is an inappropriate counterpart for \(\mathbf{x}_0^C\).
2. Background
(1) Diffusion
Forward
- \(q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right):=\prod_{t=1}^T q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)\).
Backward
- \(p_\theta\left(\mathbf{x}_{0: T}\right):=p\left(\mathbf{x}_T\right) \prod_{t=1}^T p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\).
a) Continuous space
Prior distribution \(p\left(\mathbf{x}_T\right)=\mathcal{N}\left(\mathbf{x}_T ; \mathbf{0}, \mathbf{I}\right)\),
Forward
- \(q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{1-\beta_t} \mathbf{x}_{t-1}, \beta_t \mathbf{I}\right)\).
Backward
- \(p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right), \mathbf{\Sigma}_\theta\left(\mathbf{x}_t, t\right)\right)\).
Loss function
- \(L_{\text {simple }}(\theta):=\mathbb{E}_{t, \mathbf{x}_0, \boldsymbol{\epsilon}}\left[ \mid \mid \boldsymbol{\epsilon}-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right) \mid \mid ^2\right]\).
b) Discrete space
The diffusion process can be defined in discrete spaces using categorical distributions.
Forward
- \(q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right) =\mathcal{C}\left(\mathbf{x}_t ;\left(1-\beta_t\right) \mathbf{x}_{t-1}+\beta_t / K\right)\).
Backward
- \(p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right) =\sum_{\hat{\mathbf{x}}_0=1}^K q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \hat{\mathbf{x}}_0\right) p_\theta\left(\hat{\mathbf{x}}_0 \mid \mathbf{x}_t\right)\).
- where \(\mathcal{C}\) indicates a categorical distribution
- \(K\) is the number of categories
- uniform noise is added
(2) Tabular Data Synthesis
pass
3. Proposed Method
(1) Co-evolving Conditional Diffusion Models
Given a sample \(\mathbf{x}_0\) , where \(\mathbf{x}_0=\left(\mathbf{x}_0^C, \mathbf{x}_0^D\right)\).
- \(N_C\) continuous columns \(C=\left\{C_1, C_2, \ldots, C_{N_C}\right\}\)
- \(N_D\) discrete columns \(D=\) \(\left\{D_1, D_2, \ldots, D_{N_D}\right\}\),
Two diffusion models read conditions from each other
- continuous and discrete diffusion models
To generate one related data pair with two models, we input each other’s output as a condition
Pair \(\left(\mathbf{x}_0^C, \mathbf{x}_0^D\right)\) are then simultaneously perturbed at each forward time step
Parameter \(\theta_C\) (resp. \(\theta_D\) ) is updated based on …
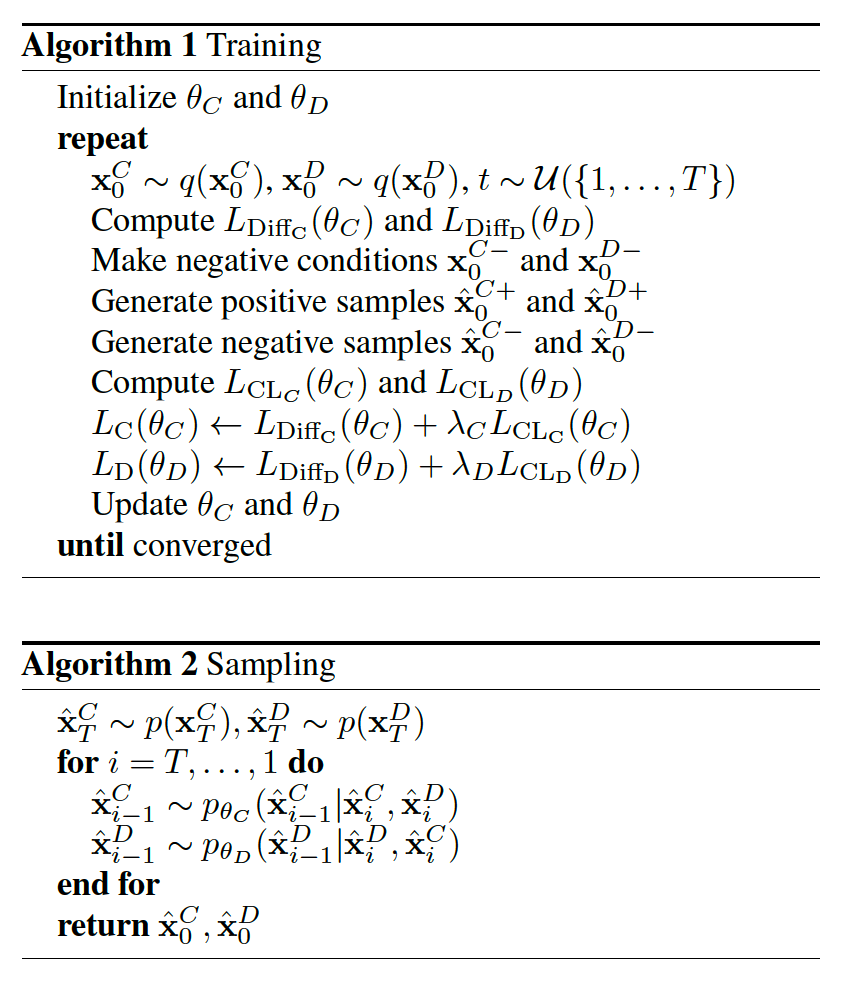
- \(L_{\mathrm{Diff}_{\mathrm{C}}}\left(\theta_C\right):=\mathbb{E}_{t, \mathbf{x}_0^C, \boldsymbol{\epsilon}}\left[ \mid \mid \boldsymbol{\epsilon}-\boldsymbol{\epsilon}_{\theta_C}\left(\mathbf{x}_t^C, t \mid \mathbf{x}_t^D\right) \mid \mid ^2\right]\).
- \(L_{\text {Diff }_{\mathrm{D}}}\left(\theta_D\right)= \mathbb{E}_q[\underbrace{D_{\mathrm{KL}}\left[q\left(\mathbf{x}_T^D \mid \mathbf{x}_0^D\right) \mid \mid p\left(\mathbf{x}_T^D\right)\right]}_{L_T} \underbrace{-\log p_{\theta_D}\left(\mathbf{x}_0^D \mid \mathbf{x}_1^D, \mathbf{x}_1^C\right)}_{L_0}+\sum_{t=2}^T \underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1}^D \mid \mathbf{x}_t^D, \mathbf{x}_0^D\right) \mid \mid p_{\theta_D}\left(\mathbf{x}_{t-1}^D \mid \mathbf{x}_t^D, \mathbf{x}_t^C\right)\right)}_{L_{t-1}}]\).
[ Reverse Process ]
- Generated samples, \(\hat{\mathbf{x}}_0^C\) and \(\hat{\mathbf{x}}_0^D\), are progressively synthesized from each noise space.
- The prior distributions
- \(p\left(\mathbf{x}_T^C\right)=\mathcal{N}\left(\mathbf{x}_T^C ; \mathbf{0}, \mathbf{I}\right)\) .
- \(p\left(\mathbf{x}_T^{D_i}\right)=\mathcal{C}\left(\mathbf{x}_T^{D_i} ; 1 / K_i\right)\),
- where \(\left\{K_i\right\}_{i=1}^{N_D}\) is the number of categories of the discrete column \(\left\{D_i\right\}_{i=1}^{N_D}\).
a) Forward
\(\begin{array}{r} q\left(\mathbf{x}_t^C \mid \mathbf{x}_0^C\right)=\mathcal{N}\left(\mathbf{x}_t^C ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0^C,\left(1-\bar{\alpha}_t\right) \mathbf{I}\right), \\ q\left(\mathbf{x}_t^{D_i} \mid \mathbf{x}_0^{D_i}\right)=\mathcal{C}\left(\mathbf{x}_t^{D_i} ; \bar{\alpha}_t \mathbf{x}_0^{D_i}+\left(1-\bar{\alpha}_t\right) / K_i\right), \end{array}\).
- where \(1 \leq i \leq N_D, \alpha_t:=1-\beta_t\) and \(\bar{\alpha}_t:=\prod_{i=1}^t \alpha_i\).
b) Reverse
\(\begin{gathered} p_{\theta_C}\left(\mathbf{x}_{0: T}^C\right):=p\left(\mathbf{x}_T^C\right) \prod_{t=1}^T p_{\theta_C}\left(\mathbf{x}_{t-1}^C \mid \mathbf{x}_t^C, \mathbf{x}_t^D\right), \\ p_{\theta_D}\left(\mathbf{x}_{0: T}^{D_i}\right):=p\left(\mathbf{x}_T^{D_i}\right) \prod_{t=1}^T p_{\theta_D}\left(\mathbf{x}_{t-1}^{D_i} \mid \mathbf{x}_t^{D_i}, \mathbf{x}_t^C\right), \end{gathered}\).
- where \(1 \leq i \leq N_D\) and the reverse transition probabilities
(2) Contrastive Learning
Triplet Loss
- \(L_{\mathrm{CL}}(A, P, N)=\sum_{i=0}^S\left[\max \left\{d\left(A_i, P_i\right)-d\left(A_i, N_i\right)+m, 0\right\}\right]\).
Final Loss function
-
\(L_{\mathrm{C}}\left(\theta_C\right)=L_{\text {Diff }_{\mathrm{C}}}\left(\theta_C\right)+\lambda_C L_{\mathrm{CL}}\left(\theta_C\right)\).
-
\(L_{\mathrm{D}}\left(\theta_D\right)=L_{\text {Diff }_D}\left(\theta_D\right)+\lambda_D L_{\mathrm{CL}_{\mathrm{D}}}\left(\theta_D\right)\).
Negative Condition
- Negative conditions, \(\mathbf{x}_0^{D-}\) and \(\mathbf{x}_0^{C-}\), are the keys to generate the negative samples
- By randomly shuffling the continuous and discrete variable sets so that they do not match
(3) Training & Sampling