TSMixer: An all-MLP Architecture for TS Forecasting
Contents
- Abstract
- Introduction
- Related Works
- Linear Models for TS Forecasting
- Theoretical Insights
- Differences from DL
- TSMixer Architecture
- TSMixer for MTS Forecasting
- Extended TSMixer for TS Forecasting with Auxiliary Information
- align
- mixing
- Experiments
- MTS LTSF
- M5
0. Abstract
DL basd on RNN/Transformer ??
NO!! Simple univariate linear models can outperform such DL models
This paper
- investigate the capabilities of linear models for TS forecasting
- present Time-Series Mixer (TSMixer)
TSMixer
- a novel architecture designed by stacking MLPs
-
based on mixing operations along both the time & feature dimensions
- simple-to-implement
Results
-
SOTA
- Underline the importance of efficiently utilizing cross-variate & auxiliary information
- various analyses
1. Introduction
The forecastability of TS often originates from 3 major aspects:
- (1) Persistent temporal patterns
- trend & seaonal patterns
- (2) Cross-variate information
- correlations between different variables
- (3) Auxiliary Features
- comprising static features and future information
ARIMA (Box et al., 1970)
- for UTS forecasting
- only temporal information is available
DL ( Transformer-based models )
-
capture both complex temporal patterns & cross-variate dependencies
-
MTS model : should be more effective than UTS model
- due to their ability to leverage cross-variate information.
( \(\leftrightarrow\) Simple Linear model ( Linear / DLinear / NLinear ) by Zeng et al. (2023) )
-
MTS model seem to suffer from overfitting
( especially when the target TS is not correlated with other covariates )
2 essential questions
Analyzing the effectiveness of temporal linear models.
Gradually increase the capacity of linear models by
- stacking temporal linear models with non-linearities (TMix-Only)
- introducing cross-variate feed-forward layers (TSMixer)
TSMixer
-
time-mixing & feature-mixing
- alternatively applies MLPs across time and feature dimensions
-
residual designs
-
ensure that TSMixer retains the capacity of temporal linear models,
while still being able to exploit cross-variate information.
-

Experiment 1
Datasets : long-term forecasting datasets (Wu et al., 2021)
( where UTS models » MTS models )
Ablation study
-
effectiveness of stacking temporal linear models
-
cross-variate information is less beneficial on these popular datasets
( = explaining the superior performance of UTS models. )
-
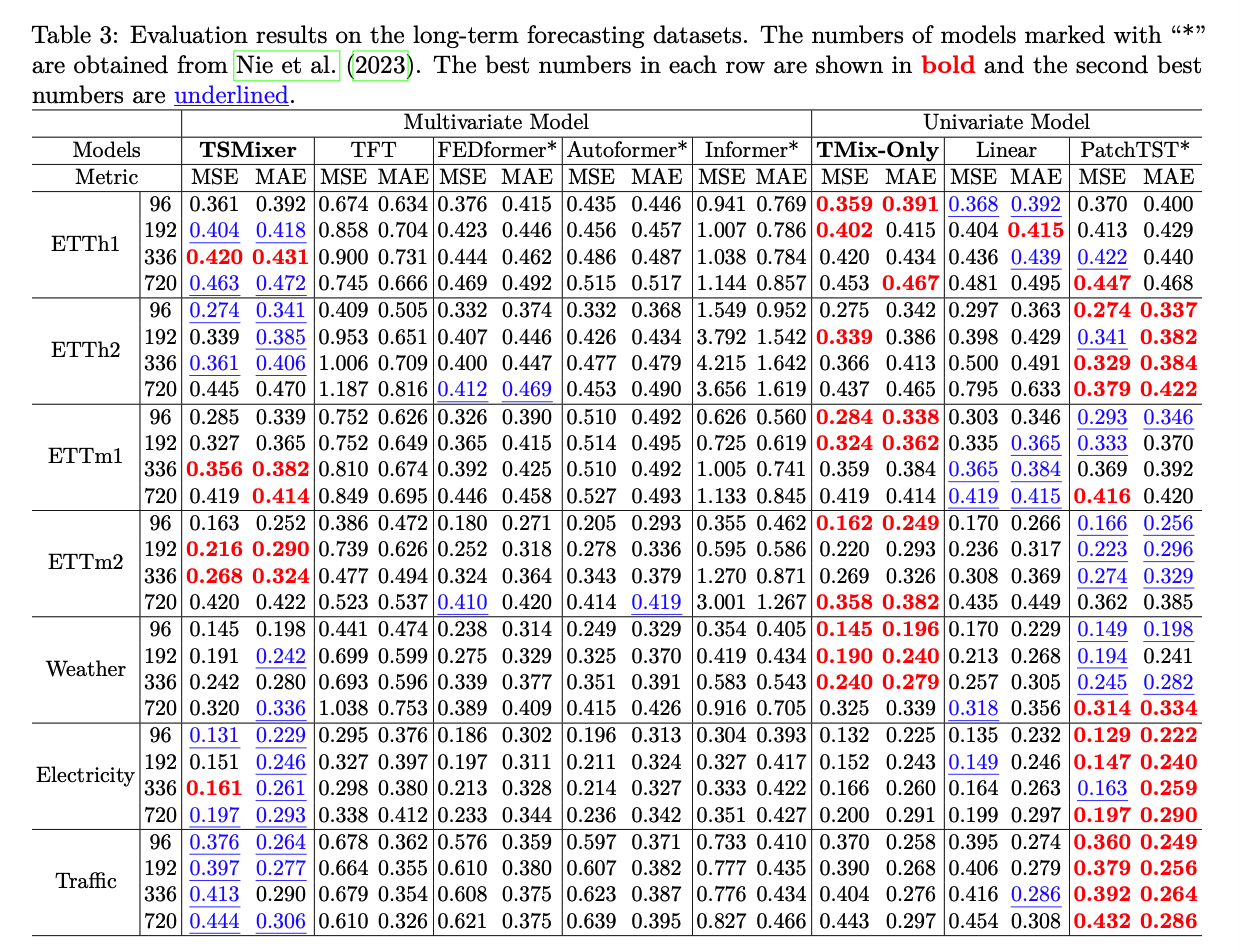
Even so, TSMixer is on par with SOTA UTS models
Experiment 2
( to demonstrate the benefit of MTS models )
Datasets : challenging M5 benchmark
- a large-scale retail dataset used in the M-competition
- contains crucial cross-variate interactions
- such as sell prices
Experiments
-
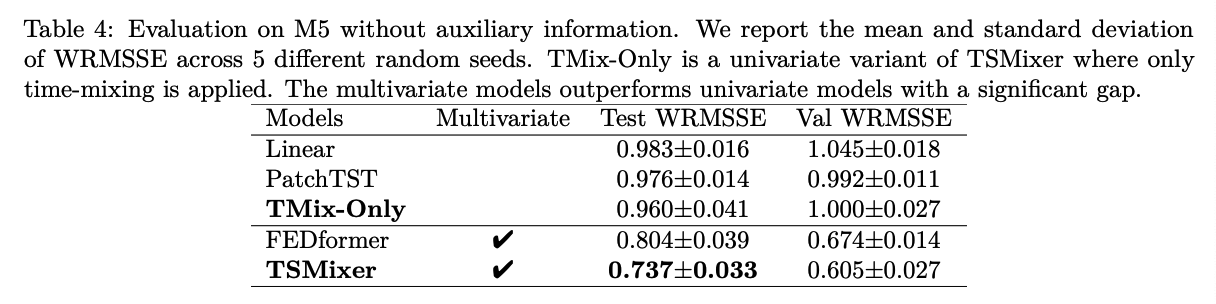
cross-variate information indeed brings significant improvement!
( + TSMixer can effectively leverage this information )
Propose a principle design to extend TSMixer…
\(\rightarrow\) to handle auxiliary information
-
ex) static features & future time-varying features.
-
Details : aligns the different types of features into the same shape
& applied mixer layers on the concatenated features to leverage the interactions between them.
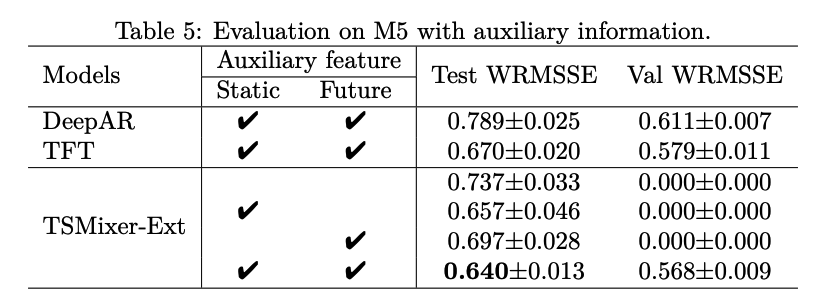
Applications
outperforms models that are popular in industrial applications
- ex) DeepAR (Salinas et al. 2020, Amazon SageMaker) & TFT (Lim et al. 2021, Google Cloud Vertex)
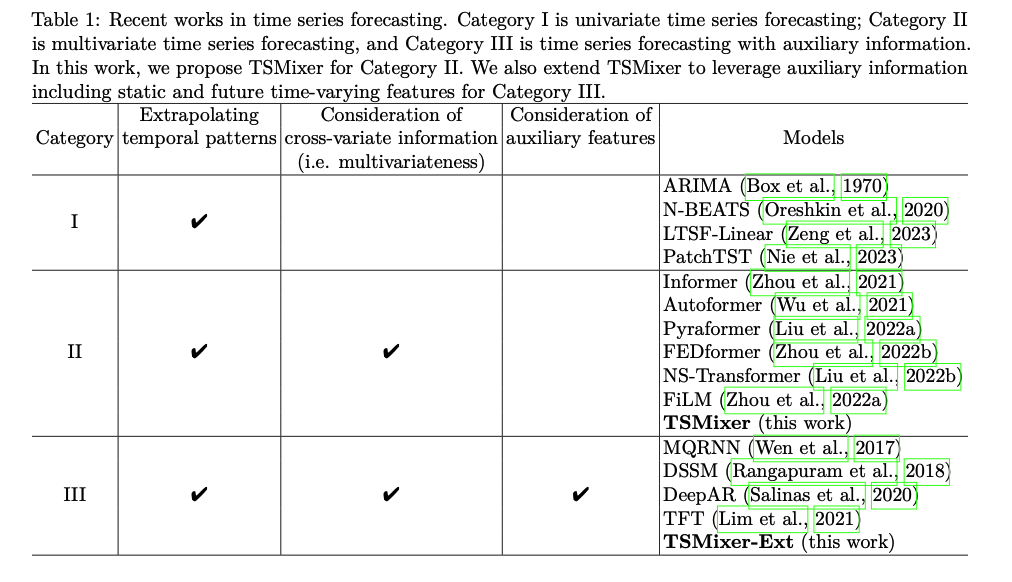
2. Related Works
Table 1 : split into three categories
- (1) UTS forecasting
- (2) MTS forecasting
- (3) MTS forecasting with auxiliary information.
MTS forecasting
- Key Idea : modeling the complex relationships between covariates should improve the forecasting performance
- Example : Transformer-based models
- superior performance in modeling long and complex sequential data
- ex) Informer (Zhou et al., 2021) and Autoformer (Wu et al., 2021)
- tackle the efficiency bottleneck
- ex) FEDformer (Zhou et al., 2022b) and FiLM (Zhou et al., 2022a)
- decompose the sequences using FFT
- ex) ETC
- improving specific challenges, such as non-stationarity (Kim et al., 2022; Liu et al., 2022b).
UTS works better??
- Linear / DLinear /NLinear ( Zeng et al. (2023) )
- show the counter-intuitive result that a simple UTS linear model
- PatchTST ( Nie et al. (2023) )
- advocate against modeling the cross-variate information
- propose a univariate patch Transformer for MTS forecasting
This paper :
- UTS » MTS ?? NO! Dataset Bias!
Use along with Auxiliary information
- static features (e.g. location)
- future time-varying features (e.g. promotion in coming weeks),
Algorithms example )
- ex) state-space models (Rangapuram et al., 2018; Alaa & van der Schaar, 2019; Gu et al., 2022)
- ex) RNN variants ( Wen et al. (2017); Salinas et al. (2020) )
- ex) Attention models ( Lim et al. (2021) )
\(\rightarrow\) Real-world time-series datasets are more aligned with this setting!
\(\rightarrow\) \(\therefore\) achieved great success in industry
- DeepAR (Salinas et al., 2020) of AWS SageMaker
- TFT (Lim et al., 2021) of Google Cloud Vertex).
\(\leftrightarrow\) Drawback : complexity
Motivations for TSMixer
stem from analyzing the performance of linear models for TS forecasting.
3. Linear Models for TS Forecasting
(1) Theoretical insights on the capacity of linear models
- have been overlooked due to its simplicity
(2) Compare linear models with other architectures
-
show that linear models have a characteristic not present in RNNs and Transformers
( = Linear models have the appropriate representation capacity to learn the time dependency for a UTS )
Notation
\(\boldsymbol{X} \in \mathbb{R}^{L \times C_x}\) : input
\(\boldsymbol{Y} \in \mathbb{R}^{T \times C_y}\) : target
Focus on the case where \(\left(C_y \leq C_x\right)\)
Linear model params : \(\boldsymbol{A} \in \mathbb{R}^{T \times L}, \boldsymbol{b} \in \mathbb{R}^{T \times 1}\)
- \(\hat{\boldsymbol{Y}}=\boldsymbol{A} \boldsymbol{X} \oplus \boldsymbol{b} \in \mathbb{R}^{T \times C_x}\).
- \(\oplus\) : column-wise addition
(1) Theoretical insights
Most impactful real-world applications have either ..
- (1) smoothness
- (2) periodicity
Assumption 1) Time series is periodic (Holt, 2004; Zhang \& Qi, 2005).
(A) arbitrary periodic function \(x(t)=x(t-P)\), where \(P<L\) is the period.
perfect solution :
- \(\boldsymbol{A}_{i j}=\left\{\begin{array}{ll} 1, & \text { if } j=L-P+(i \bmod P) \\ 0, & \text { otherwise } \end{array}, \boldsymbol{b}_i=0 .\right.\).
(B) affine-transformed periodic sequences, \(x(t)=a \cdot x(t-P)+c\), where \(a, c \in \mathbb{R}\) are constants
perfect solution :
- \(\boldsymbol{A}_{i j}=\left\{\begin{array}{ll} a, & \text { if } j=L-P+(i \bmod P) \\ 0, & \text { otherwise } \end{array}, \boldsymbol{b}_i=c .\right.\).
Assumption 2) Time series can be decomposed into a periodic sequence and a sequence with smooth trend
- proof in Appendix A
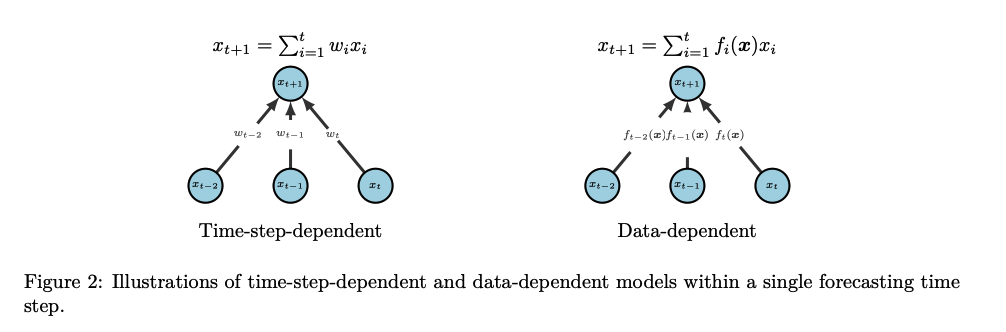
(2) Differences from DL
Deeper insights into why previous DL models tend to overfit the data
- Linear models = “time-step-dependent”
- weights of the mapping are fixed for each time step
- Recurrent / Attention models = “data-dependent”
- weights over the input sequence are outputs of a “data-dependent” function
Time-step-dependent models vs. Data-dependent models
Time-step-dependent linear modes
- simple
- highly effective in modeling temporal patterns
Data-dependent models
-
high representational capacity
( = achieving time-step independence is challenging )
-
usually overfit on the data
( = instead of solely considering the positions )
4. TSMixer Architecture
Propose a natural enhancement by stacking linear models with non-linearities
Use common DL techniques
- normalization
- residual connections
\(\rightarrow\) However, this architecture DOES NOT take cross-variate information into account.
For cross-variate information…
\(\rightarrow\) we propose the application of MLPs in
- the time-domain
- the feature-domain
in an alternating manner.
Time-domain MLPs
- shared across all of the features
Feature-domain MLPs
- shared across all of the time steps.
Time-Series Mixer (TSMixer)
Interleaving design between these 2 operations
-
efficiently utilizes both TEMPORAL dependencies & CROSS-VARIATE information
( while limiting computational complexity and model size )
-
allows to use a long lookback window
- parameter growth in only \(O(L+C)\), not \(O(LC)\) if FC-MLPs were used
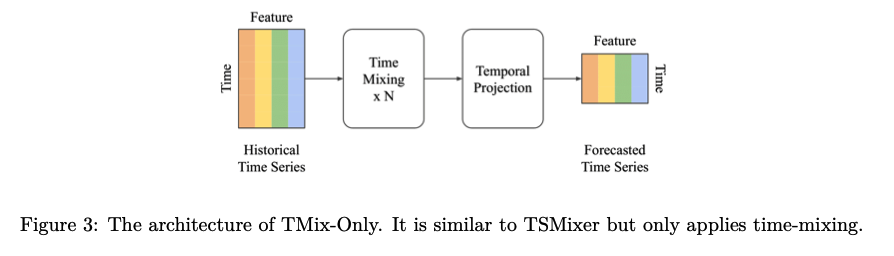
TMix-Only : also consider a simplified variant of TSMixer
- only employs time-mixing
- consists of a residual MLP shared across each variate
Extension of TSMixer with auxiliary information
(1) TSMixer for MTS Forecasting
TSMixer applies MLPs alternatively in (1) time and (2) feature domains.
Components
-
Time-mixing MLP:
- for temporal patterns
- FC layer & activation function & dropout
- transpose the input
- to apply the FC layers along the time domain ( shared by features )
- single-layer MLP ( already proves to be a strong model )
-
Feature-mixing MLP:
- shared by time steps
- leverage covariate information
- two-layer MLPs
-
Temporal Projection:
-
FC layer applied on time domain
-
not only learn the temporal patterns,
but also map the TS from input length \(L\) to forecast length \(T\)
-
-
Residual Connections:
- between each (1) time-mixing and (2) feature-mixing MLP
- learn deeper architectures more efficiently
- effectively ignore unnecessary time-mixing and feature-mixing operations.
-
Normalization:
- preference between BN and LN is task-dependent
- ( Nie et al. (2023) ) advantages of BN on common TS
- apply 2D normalization on both time & feature dimensions
- preference between BN and LN is task-dependent
Architecture of TSMixer is relatively simple to implement.
(2) Extended TSMixer for TS Forecasting with Auxiliary Information
Real-world scenarios : access to ..
- (1) static features : \(\boldsymbol{S} \in \mathbb{R}^{1 \times C_s}\)
- (2) future time-varying features : \(\boldsymbol{Z} \in \mathbb{R}^{T \times C_z}\)
\(\rightarrow\) extended to multiple TS, represented by \(\boldsymbol{X}^{(i)}{ }_{i=1}^N\),
- \(N\) : number of TS
Long-term forecasting
-
( In general ) Only consider the historical features & targets on all variables
(i.e. \(\left.C_x=C_y>1, C_s=C_z=0\right)\).
-
( In this paper ) Also consider the case where auxiliary information is available
(i.e. \(C_s>0, C_z>0\) ).
To leverage the different types of features…
\(\rightarrow\) Propose a principle design that naturally leverages the feature mixing to capture the interaction between them.
- (1) Design the align stage
- to project the feature with different shapes into the same shape.
- (2) Concatenate the features
- apply feature mixing on them.
Architecture comprises 2parts:
- (1) align
- (2) mixing.
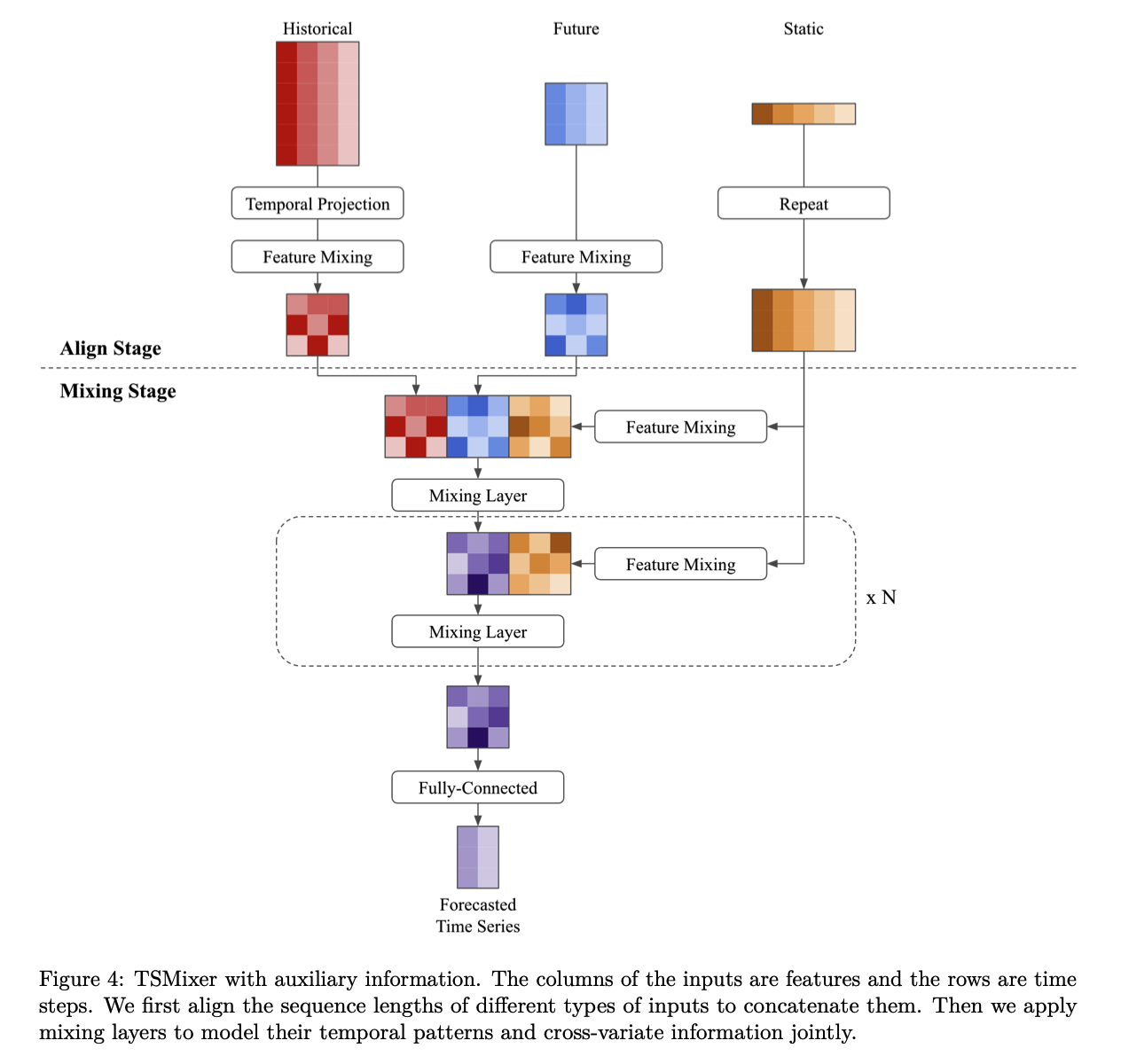
a) Align
aligns historical features \(\left(\mathbb{R}^{L \times C_x}\right)\) and future features ( \(\left.\mathbb{R}^{T \times C_z}\right)\) into the same shape \(\left(\mathbb{R}^{L \times C_h}\right)\)
- [Historical input] apply temporal projection & feature-mixing layer
- [Future input] apply feature-mixing layer
- [Static input] repeat to transform their shape from \(\mathbb{R}^{1 \times C_s}\) to \(\mathbb{R}^{T \times C_s}\)
b) Mixing
Mixing layer
-
time-mixing & feature-mixing operations
-
leverages temporal patterns and cross-variate information from all features collectively.
FC layer
- to generate outputs for each time step.
- slightly modify mixing layers to better handle M5 dataset ( described in Appendix \(B\) )
5. Experiments
Datasets
- 7 popular MTS long-term forecasting benchmarks
- w/o auxiliary information
- Large-scale real-world retail dataset, M5
- w auxiliary information
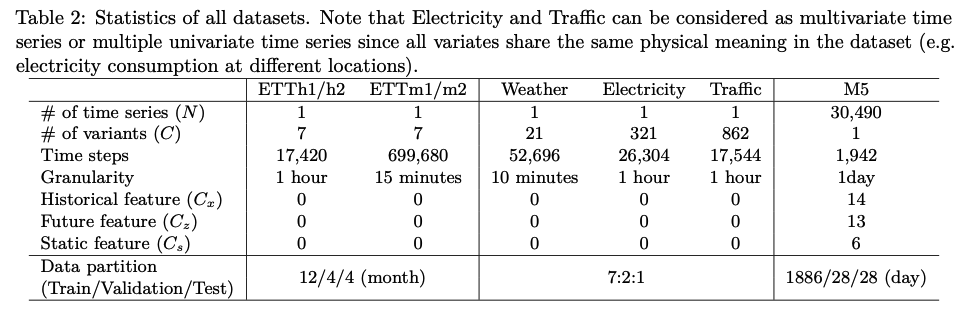
- containing 30,490 TS with static features & time-varying features
- more challenging
[ MTS forecasting benchmarks ] Settings
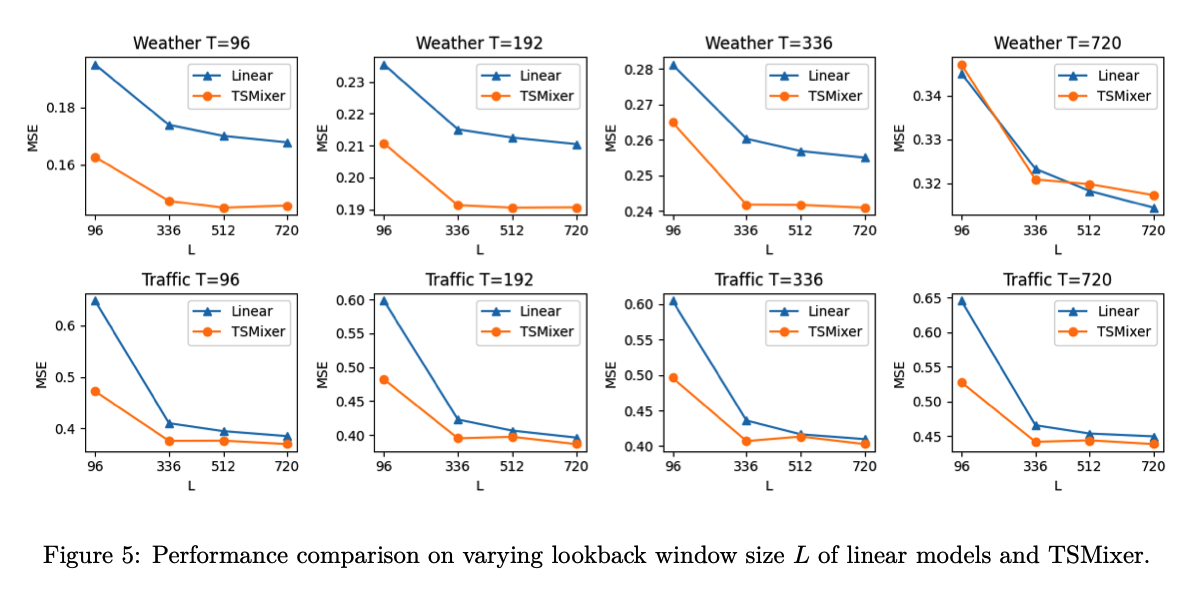
- input length \(L = 512\)
- prediction lengths of \(T = \{96, 192, 336, 720\}\)
- Adam optimization
- Loss : MSE
- Metric : MSE & MAE
- Apply reversible instance normalization (Kim et al., 2022) to ensure a fair comparison with the state-of-the-art PatchTST (Nie et al., 2023).
[ M5 dataset ] Settings
- data processing from Alexandrov et al. (2020).
- input length \(L=35\)
- prediction length of \(T = 28\)
- Loss : log-likelihood of negative binomial distribution
- follow the competition’s protocol to aggregate the predictions at different levels
- Metric : WRMSSE ( Weighted Root Mmean Squared Scaled Error )
(1) MTS LTSF
Effects of \(L\)
(2) M5
to explore the model’s ability to leverage
- (1) cross-variate information
- (2) auxiliary features
Forecast with HISTORICAL features only
Forecast with AUXILIARY information
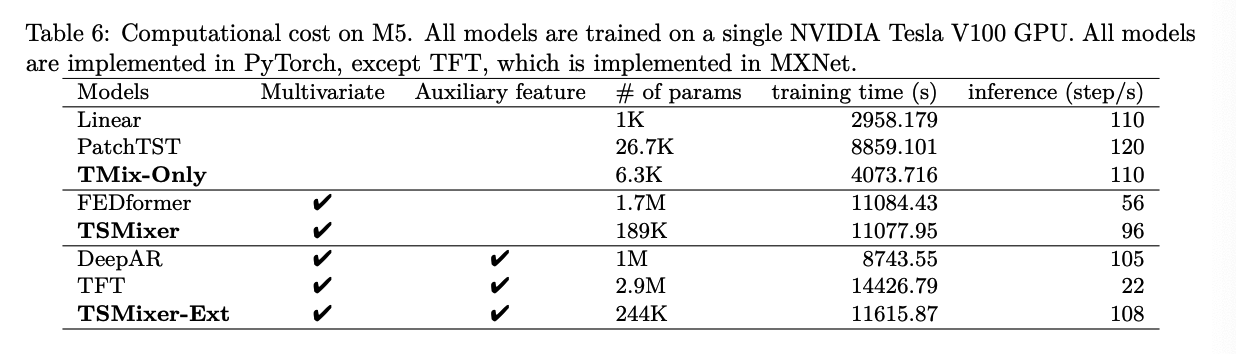
Computational Cost