Domain Adaptation for TSF via Attention Sharing (2021)
Contents
- Abstract
- Introduction
- Related Works
- DA in forecasting
- DAF (Domain Adaptation Forecaster)
- Sequence Generator
- Domain Discriminator
- Adversarial Training
0. Abstract
DNN for TSF : when data is “sufficient”
\(\rightarrow\) problem : LIMITED data
DAF (Domain Adaptation Forecaster)
- novel DA framework
- dataset
- source : abundant
- target : scarce
- propose an…
- “attention-based shared module” with domain discriminator across domains
- “private modules” for individual domains
- jointly train source & target domains
1. Introduction
Domain shift
- distributional discrepancy between source & taget
DA (Domain Adaptation)
- mitigate the harmful effect of domain shift
- (existing methods mainly focus on “classification”)
Attention-based models in TSF
-
can be suitable choice under DA setting
-
2 steps
- 1) sequence encoding : utilize data from BOTH domain
- 2) context matching
-
generate “domain-aware” forecasts,
based on encoded features from different domains
by sharing the context matching module
2. Related Works
DL for TSF
- usually consist of “sequential feature encoder”
- generate predictions with “decoder”
- downside : require LARGE dataset
Domain Adaptation
-
to transfer knowledge
-
inspite of success in NLP… not in TSF
-
1) hard to find a common source dataset in TS
( + expensive to pre-train different model for each target domain )
-
2) predicted values are not subject to fixed vocabulary
( heavily rely on extrapolation )
-
3) many domain-specific cofounding factors, not encoded in pre-trained model
-
Dominant approach for DA :
- learn a domain-invariant representation
- feature extractor
- map raw data from each domain into a “domain-invariant” latent space
- recognition model
- learns a correspondence between these “representations” & “labels” using source data
3. DA in forecasting
Time Series Forecasting
Notation
- # of TS : \(N\)
- each TS consists of…
- observations : \(z_{i, t} \in \mathbb{R}\)
- (optional) input covariates : \(\xi_{i, t} \in \mathbb{R}^{d}\)
- TSF task : \(z_{i, T+1}, \ldots, z_{i, T+\tau}=F\left(z_{i, 1}, \ldots, z_{i, T}, \xi_{i, 1}, \ldots, \xi_{i, T+\tau}\right),\)
For simplicity…
- drop the covariates \(\left\{\xi_{i, t}\right\}_{t=1}^{T+\tau}\)
- dataset \(\mathcal{D}=\left\{\left(\mathbf{X}_{i}, \mathbf{Y}_{i}\right)\right\}_{i=1}^{N}\)
- \(\mathbf{X}_{i}=\left[z_{i, t}\right]_{t=1}^{T}\) : past observation
- \(\mathbf{Y}_{i}=\left[z_{i, t}\right]_{t=T+1}^{T+\tau}\) : future ground truth
Adversarial DA in forecasting
Setting : we have another “relevant” dataset
- source data : \(\mathcal{D}_{\mathcal{S}}\)
- target data : \(\mathcal{D}_{\mathcal{T}}\)
Goal : produce an accurate forecast on target domain \(\mathcal{T}\)
- target prediction : \(\hat{\mathbf{Y}}_{i}=\left[\hat{z}_{i, t}\right]_{t=T+1}^{T+\tau}, i=1, \ldots, N\)
Objective Function :
- \(\min _{G_{\mathcal{S}}, G_{\mathcal{T}}} \max _{D} \mathcal{L}_{\text {seq }}\left(\mathcal{D}_{\mathcal{S}} ; G_{\mathcal{S}}\right)+\mathcal{L}_{\text {seq }}\left(\mathcal{D}_{\mathcal{T}} ; G_{\mathcal{T}}\right)-\lambda \mathcal{L}_{\text {dom }}\left(\mathcal{D}_{\mathcal{S}}, \mathcal{D}_{\mathcal{T}} ; D, G_{\mathcal{S}}, G_{\mathcal{T}}\right),\).
- \(\mathcal{L}_{\text {seq }}\) : estimation error
- \(\mathcal{L}_{\text {dom }}\) : domain classification error
- \(G_{\mathcal{S}}, G_{\mathcal{T}}\) : sequence generators that estimate sequences in each domain
- \(D\) : discriminator
- \(\mathcal{L}_{\text {seq }}(\mathcal{D} ; G)=\sum_{i=1}^{N} \underbrace{\left(\frac{1}{T} \sum_{t=1}^{T} l\left(z_{i, t}, \hat{z}_{i, t}\right)\right.}_{\text {reconstruction error }}+\underbrace{\left.\frac{1}{\tau} \sum_{t=T+1}^{T+\tau} l\left(z_{i, t}, \hat{z}_{i, t}\right)\right)}_{\text {prediction error }}\).
- \(\mathcal{L}_{\text {dom }}\left(\mathcal{D}_{\mathcal{S}}, \mathcal{D}_{\mathcal{T}} ; D, G_{\mathcal{S}}, G_{\mathcal{T}}\right)=-\frac{1}{ \mid \mathcal{H}_{\mathcal{S}} \mid } \sum_{h_{i, t} \in \mathcal{H}_{\mathcal{S}}} \log D\left(h_{i, t}\right)-\frac{1}{ \mid \mathcal{H}_{\mathcal{T}} \mid } \sum_{h_{i, t} \in \mathcal{H}_{\mathcal{T}}} \log \left[1-D\left(h_{i, t}\right)\right],\).
4. DAF (Domain Adaptation Forecaster)
Conventional DA
- align the representation of “ENTIRE input sequence”
But, local representations within a time period are likely to be more imporant
\(\rightarrow\) use “Attention mechanism”
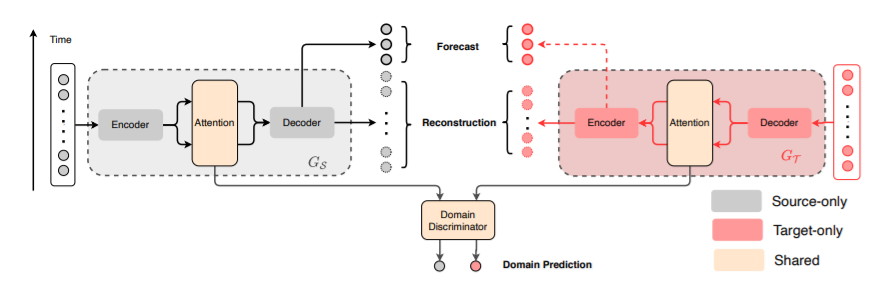
- [1] Private Encoders : privately owned by each domain
- extract “patterns” & “values”
- [2] Shared Attention
- compute similarity scores by “domain invariant Q & K” with “patterns”
- [3] Private Decoders : map the attention outputs into “each domain”
(1) Sequence Generator ( \(G_S\), \(G_T\) )
\(G\) processes an input TS \(\mathbf{X}=\left[z_{t}\right]_{t=1}^{T}\), in following order
- 1) private encoders
- 2) shared attention
- 3) private decoder
and outputs..
- output 1) reconstructed sequence \(\hat{\mathbf{X}}\)
- output 2) predicted future \(\hat{\mathbf{Y}}\)
a) Private Encoders
- (input) raw input \(\mathbf{X}\)
- (output)
- 1) pattern embedding : \(\mathbf{P}=\left[\mathbf{p}_{t}\right]_{t=1}^{T}\)
- with \(M\) convolutions with various kernel sizes
- extract “multi-scale local patterns”
- 2) value embedding : \(\mathbf{V}=\left[\mathbf{v}_{t}\right]_{t=1}^{T}\)
- with point-wise MLP**
- 1) pattern embedding : \(\mathbf{P}=\left[\mathbf{p}_{t}\right]_{t=1}^{T}\)
- \(\mathbf{P}\) & \(\mathbf{V}\) are fed into “shared attention module”
b) Shared Attention Module
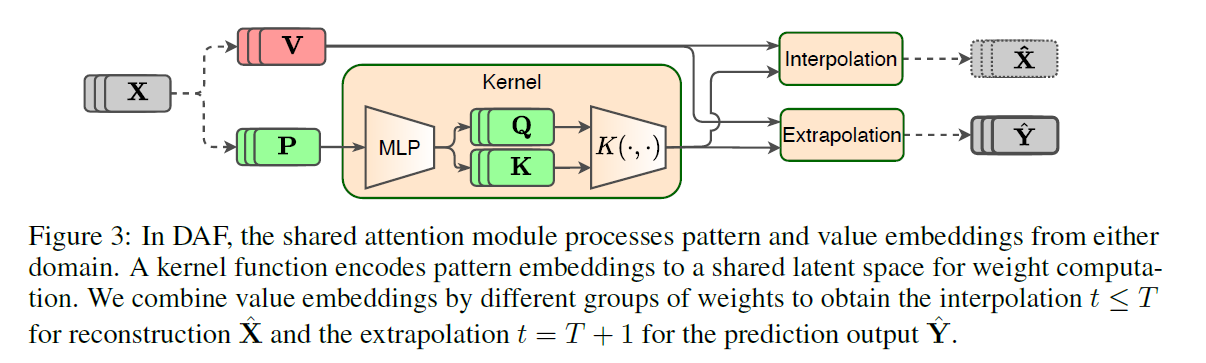
- goal : build QUERY & KEY
- \(\mathbf{Q}=\left[\mathbf{q}_{t}\right]_{t=1}^{T}\).
- \(\mathbf{K}=\left[\mathbf{k}_{t}\right]_{t=1}^{T}\).
- how?
- \(\left(\mathbf{q}_{t}, \mathbf{k}_{t}\right)=\operatorname{MLP}\left(\mathbf{p}_{t} ; \boldsymbol{\theta}_{s}\right)\).
- attention weight :
- \(\alpha\left(\mathbf{q}_{t}, \mathbf{k}_{t^{\prime}}\right)=\frac{\mathcal{K}\left(\mathbf{q}_{t}, \mathbf{k}_{t^{\prime}}\right)}{\sum_{t^{\prime} \in \mathcal{N}(t)} \mathcal{K}\left(\mathbf{q}_{t}, \mathbf{k}_{t^{\prime}}\right)}\).
- ex) \(\mathcal{K}(\mathbf{q}, \mathbf{k})=\exp \left(\mathbf{q}^{T} \mathbf{k} / \sqrt{d}\right)\)
- output :
- \(\mathbf{o}_{t}=\operatorname{MLP}\left(\sum_{t^{\prime} \in \mathcal{N}(t)} \alpha\left(\mathbf{q}_{t}, \mathbf{k}_{t^{\prime}}\right) \mathbf{v}_{\mu\left(t^{\prime}\right)} ; \boldsymbol{\theta}_{o}\right)\).
c) Private Decoders
- (input) \(\mathbf{o}_{t}\)
- (output) \(\hat{z}_{t}\) for each domain
- how?
- \(\hat{z}_{t}=\operatorname{MLP}\left(\mathbf{o}_{t} ; \boldsymbol{\theta}_{d}\right)\).
- as a result, generate…
- 1) reconstructions : \(\hat{\mathbf{X}}=\left[\hat{z}_{t}\right]_{t=1}^{T}\)
- 2) one-step prediction : \(\hat{z}_{T+1}\)
(2) Domain Discriminator
Induce the Q & K of the shared attention module to be domain-invariant
\(\rightarrow\) introduce a domain discriminator \(D: \mathbb{R}^{d} \rightarrow[0,1]\) ( as a position-wise MLP )
- \(D\left(\mathbf{q}_{t}\right)=\operatorname{MLP}\left(\mathbf{q}_{t} ; \boldsymbol{\theta}_{D}\right), D\left(\mathbf{k}_{t}\right)=\operatorname{MLP}\left(\mathbf{k}_{t} ; \boldsymbol{\theta}_{D}\right)\).
Binary classifications
- on whether \(\mathbf{q}_{t}\) and \(\mathbf{k}_{t}\) originate from the source or target
- by minimizing CE loss of \(\mathcal{L}_{\text{dom}}\)
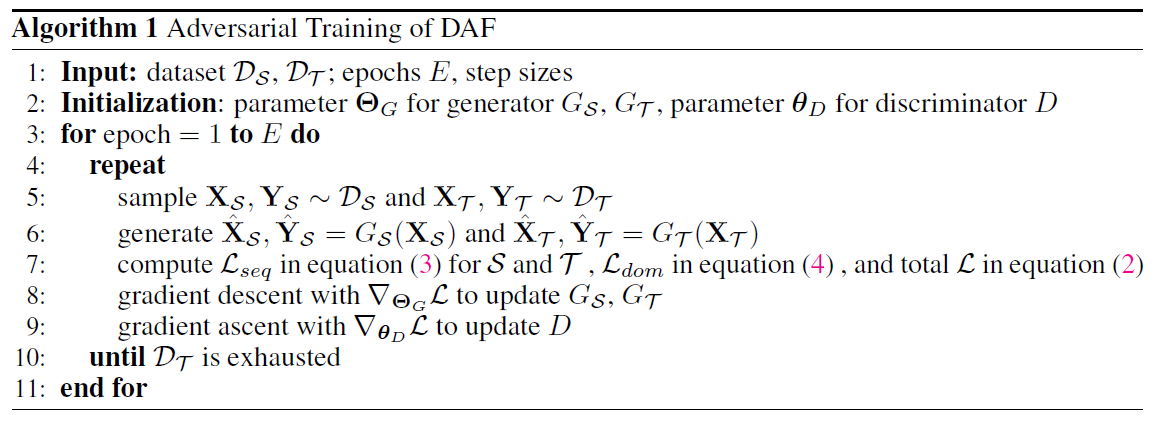
(3) Adversarial Training
Generator \(G_S\), \(G_T\)
- based on private encoder/decoder & shared attention module
Discriminator \(D\)
- induce the invariance of latent features \(\mathbf{K}\) & \(\mathbf{Q}\)